
计算机科学与探索 ›› 2022, Vol. 16 ›› Issue (8): 1706-1726.DOI: 10.3778/j.issn.1673-9418.2201057
赵月, 沈博( ), 武文亮, 周兴社
), 武文亮, 周兴社
收稿日期:2022-01-18
修回日期:2022-04-01
出版日期:2022-08-01
发布日期:2022-08-19
通讯作者:
+E-mail: shen@nwpu.edu.cn.作者简介:赵月(1986—),女,博士研究生,主要研究方向为群体智能评价。基金资助:
ZHAO Yue, SHEN Bo(), WU Wenliang, ZHOU Xingshe
Received:2022-01-18
Revised:2022-04-01
Online:2022-08-01
Published:2022-08-19
About author:ZHAO Yue, born in 1986, Ph.D. candidate. Her research interest is the evaluation of swarm intelligence.Supported by:摘要:
集群机器人是由一定数量的物理机器人组成,该系统中的个体通过交互与协作,可涌现出鲁棒、可扩展、灵活的群体智能行为。集群机器人行为建模是科学分析此类系统的基本方法之一,也是其能力评估的重要基础,研究与分析集群机器人行为模型有助于理解其行为机理。首先对集群机器人的主要特性进行总结,列举了几种典型的集群机器人空间协作行为;在此基础上,对集群机器人空间协作行为进行分类,重点总结和阐述了集群机器人空间协作行为的建模方法,包括图论、仿生模型、动力学模型以及学习模型,从方法概述、应用实例与适用场景等多维度对各类建模方法进行了分析与比较。最后提出了集群机器人空间协作行为建模有待进一步深化研究的问题,并对其未来可能的研究方向进行了展望,以更好地支撑集群机器人系统评估与优化设计。该研究旨在使相关研究人员全面系统地理解集群机器人空间协作行为建模方法。
中图分类号:
赵月, 沈博, 武文亮, 周兴社. 集群机器人空间协作行为模型构建方法综述[J]. 计算机科学与探索, 2022, 16(8): 1706-1726.
ZHAO Yue, SHEN Bo, WU Wenliang, ZHOU Xingshe. Survey on Modeling Method of Spatial Cooperative Behavior of Swarm Robots[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(8): 1706-1726.
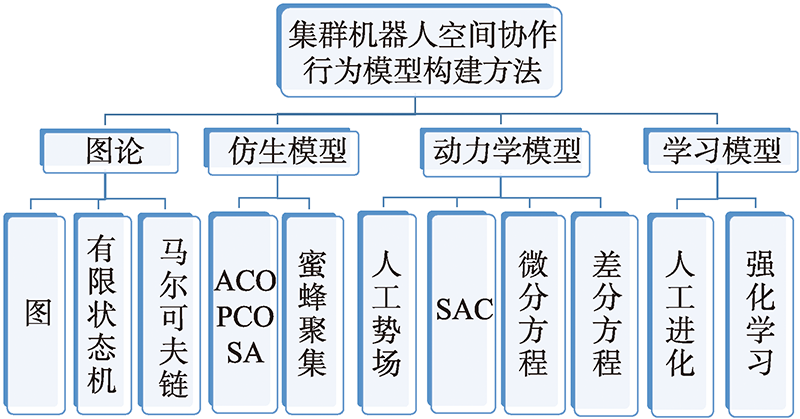
图1 集群机器人空间协作行为模型构建方法
Fig.1 Modeling method of spatial cooperative behavior of swarm robots

图2 3D地图和其对应的部分栅格地图
Fig.2 3D map and a part of corresponding grid map
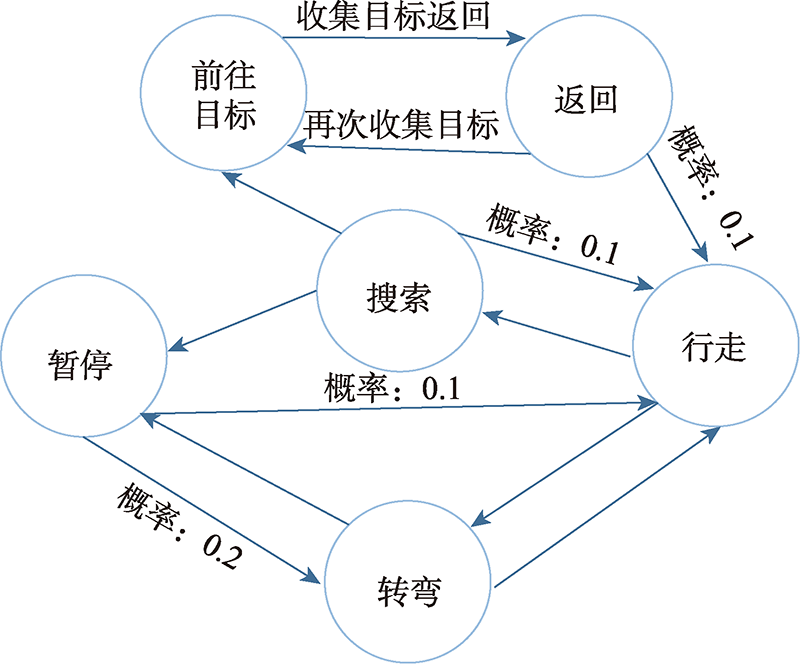
图3 集群机器人搜索中的有限状态机
Fig.3 Finite state machine in swarm robot search
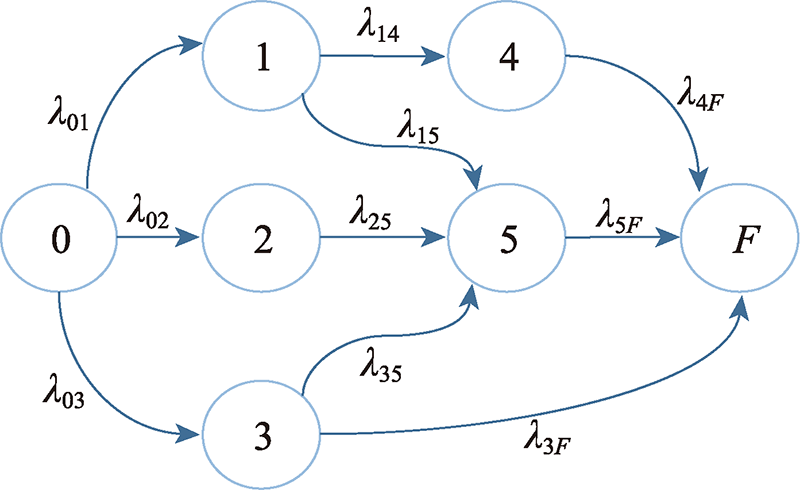
图4 马尔可夫链对无人机路径规划问题建模
Fig.4 UAVs path planning based on Markov chain
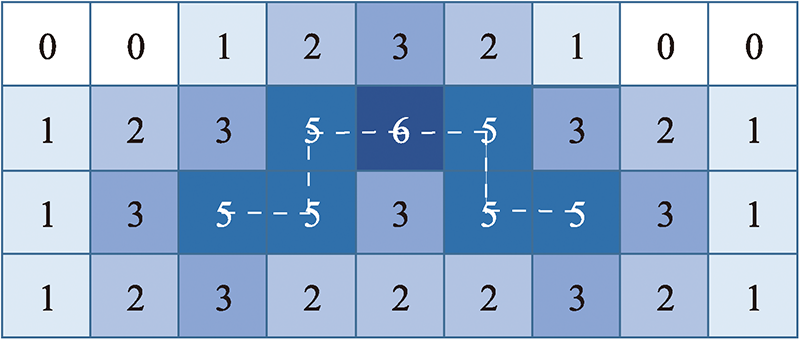
图5 基于ACO的路径规划
Fig.5 Path planning based on ACO
| 模型 | 模型优点 | 适用场景 |
|---|---|---|
| ACO | 正反馈机制,搜索分布式,易于寻找到全局最优解 | 收敛速度慢,不恰当的初始参数会减弱算法的寻优能力 |
| PCO | 优化速度快,简单易实现 | 易早熟收敛,局部寻优能力差,对于离散的优化问题处理不佳 |
| SA | 局部搜索能力强,计算过程简单,可用于求解复杂的非线性优化问题 | 全局搜索能力差,容易受到参数的影响,收敛速度慢,执行时间长 |
表1 ACO、PSO和SA建模方法对比
Table 1 Comparison of ACO, PSO and SA modeling methods
| 模型 | 模型优点 | 适用场景 |
|---|---|---|
| ACO | 正反馈机制,搜索分布式,易于寻找到全局最优解 | 收敛速度慢,不恰当的初始参数会减弱算法的寻优能力 |
| PCO | 优化速度快,简单易实现 | 易早熟收敛,局部寻优能力差,对于离散的优化问题处理不佳 |
| SA | 局部搜索能力强,计算过程简单,可用于求解复杂的非线性优化问题 | 全局搜索能力差,容易受到参数的影响,收敛速度慢,执行时间长 |
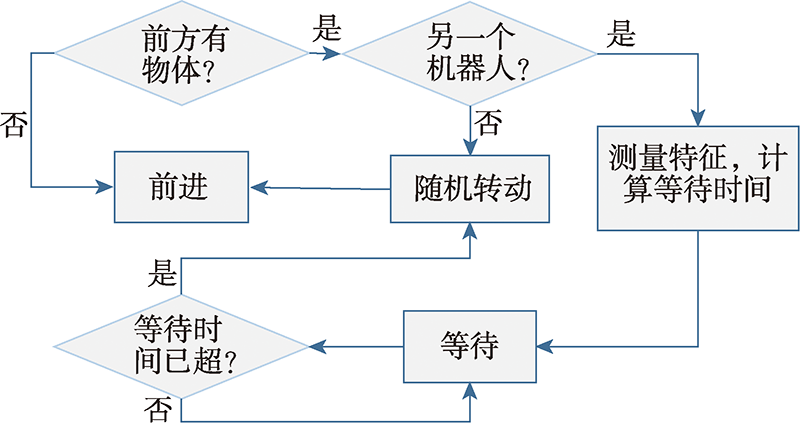
图6 蜜蜂聚集模型
Fig.6 BEECLUST model
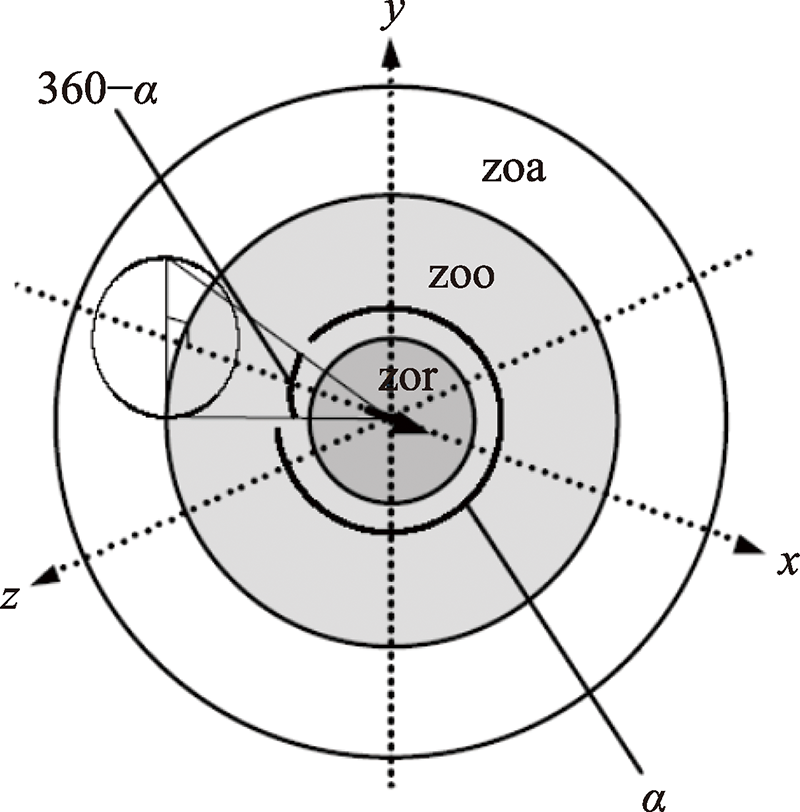
图7 Couzin模型
Fig.7 Couzin model
| 模型 | 建模维度 | 模型粒度 | 模型特点 |
|---|---|---|---|
| Vicsek | 二维 | 局部 | 简单、有效、自驱动 |
| C-S | 二维 | 全局 | 基于Vicsek,算法扩展丰富 |
| Couzin | 二维 | 全局 | 规则和算法简单 |
表2 SCA模型对比
Table 2 SCA model comparison
| 模型 | 建模维度 | 模型粒度 | 模型特点 |
|---|---|---|---|
| Vicsek | 二维 | 局部 | 简单、有效、自驱动 |
| C-S | 二维 | 全局 | 基于Vicsek,算法扩展丰富 |
| Couzin | 二维 | 全局 | 规则和算法简单 |
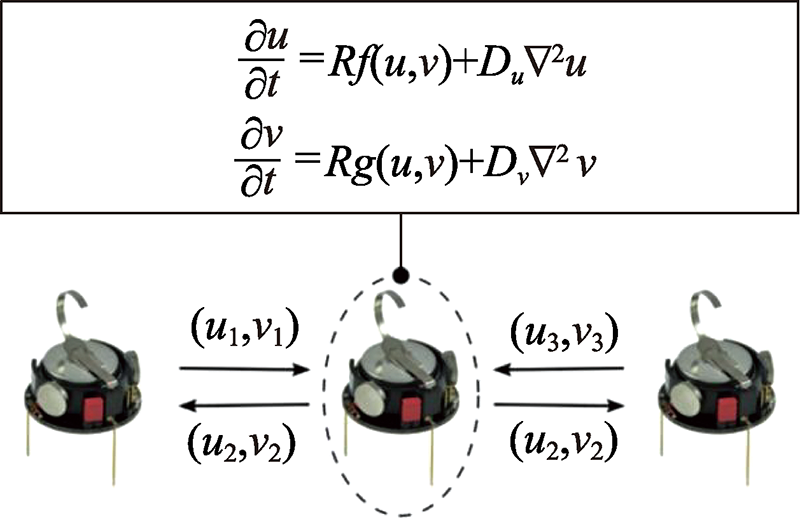
图8 集群机器人的反应扩散模型
Fig.8 Reaction diffusion model of swarm robots
| 方程 | 模型粒度 | 模型特点 |
|---|---|---|
| 速率方程 | 全局 | 可描述平均量,以数学的角度,以统计方法表述宏观行为 |
| 扩散方程 | 全局 | 由于方程的非线性项,可使集群形成丰富的图案 |
| Langevin和Fokker- Planck方程 | 全局 | 可对空间进行建模 |
表3 微分方程对比
Table 3 Comparison of differential equations
| 方程 | 模型粒度 | 模型特点 |
|---|---|---|
| 速率方程 | 全局 | 可描述平均量,以数学的角度,以统计方法表述宏观行为 |
| 扩散方程 | 全局 | 由于方程的非线性项,可使集群形成丰富的图案 |
| Langevin和Fokker- Planck方程 | 全局 | 可对空间进行建模 |
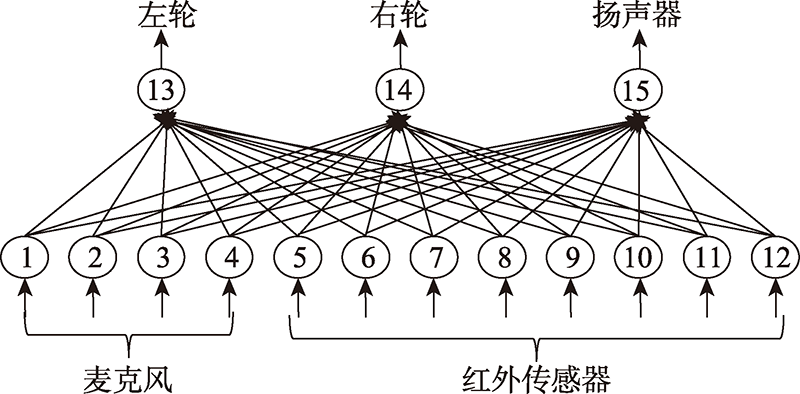
图9 人工进化中的神经网络
Fig.9 Neural network in artificial evolution
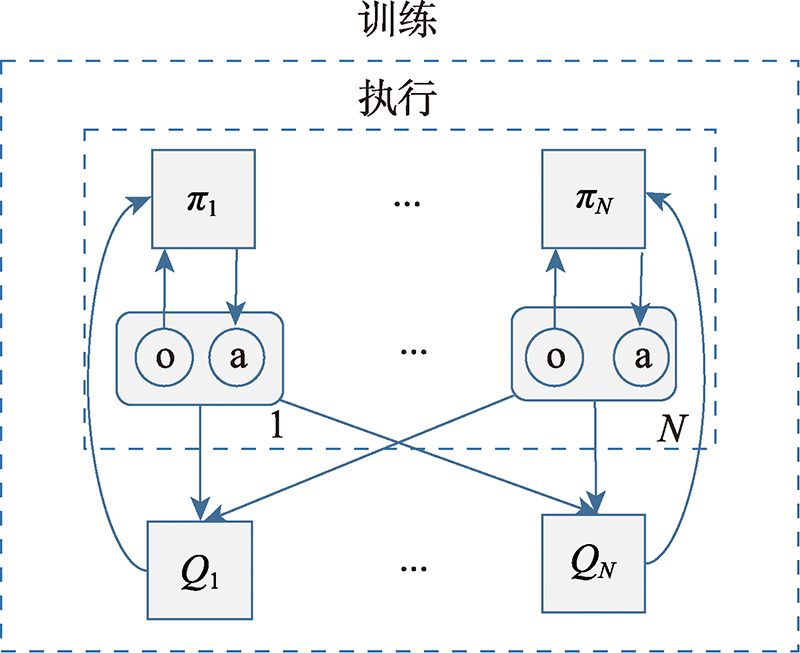
图10 MADDPG的集中训练分散执行
Fig.10 Centralized training and decentralized execution of MADDPG
| 建模方法 | 模型粒度 | 适用场景 | 模型特点 | 建模难度 | |
|---|---|---|---|---|---|
| 图论 | 图 | 宏观 | 编队、围捕、避障、导航、覆盖等 | 已开发出众多完善算法,可用已有算法对集群机器人建模 | 中 |
| 有限状态机 | 宏观/微观 | 聚集、搜索、编队等 | 简单易用,状态间的关系直观明了,适用于规模小的集群 | 低 | |
| 马尔可夫链 | 宏观 | 聚集、覆盖、避障等 | 可为不确定性提供理论支撑,需要了解集群状态变化的各种概率 | 中 | |
| 仿生模型 | ACO、PCO、SA | 宏观 | 导航、编队、集群运动等 | 建立符合实际问题的仿生规则难度较高,但是解决问题较一般的搜索方法更高效 | 高 |
| 蜜蜂聚集 | 宏观 | 聚集 | 无位置通信内存要求,可用于异构集群 | 低 | |
| 动力学模型 | 人工势场 | 宏观 | 覆盖、分散、编队等 | 在聚集上有良好的稳定性,实时性强 | 中 |
| SCA模型 | 微观 | 群集、编队等 | 基于定义的模型自驱动,简单有效 | 低 | |
| 微分方程 | 宏观 | 导航、编队、围捕、集群运动等 | 理论上可对任何行为进行建模,但是求解难度高 | 高 | |
| 学习模型 | 人工进化 | 宏观/微观 | 编队、分散、导航等 | 对环境的适应性高,但是无法保证可扩展性 | 中 |
| 强化学习 | 宏观/微观 | 群集、导航、编队等 | 适用于有全局目标、环境复杂、智能水平要求高的场景 | 高 | |
表4 各建模方法对比
Table 4 Comparison of modeling methods
| 建模方法 | 模型粒度 | 适用场景 | 模型特点 | 建模难度 | |
|---|---|---|---|---|---|
| 图论 | 图 | 宏观 | 编队、围捕、避障、导航、覆盖等 | 已开发出众多完善算法,可用已有算法对集群机器人建模 | 中 |
| 有限状态机 | 宏观/微观 | 聚集、搜索、编队等 | 简单易用,状态间的关系直观明了,适用于规模小的集群 | 低 | |
| 马尔可夫链 | 宏观 | 聚集、覆盖、避障等 | 可为不确定性提供理论支撑,需要了解集群状态变化的各种概率 | 中 | |
| 仿生模型 | ACO、PCO、SA | 宏观 | 导航、编队、集群运动等 | 建立符合实际问题的仿生规则难度较高,但是解决问题较一般的搜索方法更高效 | 高 |
| 蜜蜂聚集 | 宏观 | 聚集 | 无位置通信内存要求,可用于异构集群 | 低 | |
| 动力学模型 | 人工势场 | 宏观 | 覆盖、分散、编队等 | 在聚集上有良好的稳定性,实时性强 | 中 |
| SCA模型 | 微观 | 群集、编队等 | 基于定义的模型自驱动,简单有效 | 低 | |
| 微分方程 | 宏观 | 导航、编队、围捕、集群运动等 | 理论上可对任何行为进行建模,但是求解难度高 | 高 | |
| 学习模型 | 人工进化 | 宏观/微观 | 编队、分散、导航等 | 对环境的适应性高,但是无法保证可扩展性 | 中 |
| 强化学习 | 宏观/微观 | 群集、导航、编队等 | 适用于有全局目标、环境复杂、智能水平要求高的场景 | 高 | |
| [1] | BAYINDIR L. A review of swarm robotics tasks[J]. Neurocomputing, 2016, 172(8): 292-321. |
| [2] | SHLYAKHOV N E, VATAMANIUK I V, RONZHIN A L. Survey of methods and algorithms of robot swarm aggregation[J]. Journal of Physics: Conference Series, 2017, 803: 012146. |
| [3] | 赵成伟. 基于单链式导航的集群机器人序列任务规划算法研究[D]. 开封: 河南大学, 2019. |
| ZHAO C W. Research on sequential task planning algorithm for swarm robots based on single chain navigation[D]. Kaifeng: Henan University, 2019. | |
| [4] | 陈继清, 谭成志, 莫荣现, 等. 基于人工势场的 A* 算法的移动机器人路径规划[J]. 计算机科学, 2021, 48(11): 327-333. |
| CHEN J Q, TAN C Z, MO R X, et al. Path planning of mobile robot with A* algorithm based on artificial potential field[J]. Computer Science, 2021, 48(11): 327-333. | |
| [5] | WANG X Z. The comparison of three algorithms in shortest path issue[J]. Journal of Physics: Conference Series, 2018, 1087: 022011. |
| [6] | 赖云晖, 李瑞, 史莹晶, 等. 基于图论法的四旋翼三角形结构编队控制[J]. 控制理论与应用, 2018, 35(10): 1530-1537. |
| LAI Y H, LI R, SHI Y J, et al. On the study of a multi-quadrotor formation control with triangular structure based on graph theory[J]. Control Theory and Application, 2018, 35(10): 1530-1537. | |
| [7] | COPPOLA M, GUO J, GILL E, et al. Provable self-organizing pattern formation by a swarm of robots with limited knowledge[J]. Swarm Intelligence, 2019, 13(1): 59-94. |
| [8] | VAUGHAN N. Evolutionary robot swarm cooperative retrieval[C]// LNCS 10928: Proceedings of the 7th International Conference on Biomimetic and Biohybrid Systems, Paris, Jul 17-20, 2018. Cham: Springer, 2018: 517-521. |
| [9] | MILETITCH R, DORIGO M, TRIANNI V. Balancing exploitation of renewable resources by a robot swarm[J]. Swarm Intelligence, 2018, 12(4): 307-326. |
| [10] | LI J, TAN Y. A probabilistic finite state machine based strategy for multi-target search using swarm robotics[J]. Applied Soft Computing, 2019, 77: 467-483. |
| [11] | 贾庆勇. 对抗环境下多水下机器人协同围捕方法研究[D]. 合肥: 中国科学院大学, 2019. |
| JIA Q Y. Research on cooperative encirclement method of multiple underwater robots in countermeasure environment[D]. Hefei: University of Chinese Academy of Sciences, 2019. | |
| [12] | 胡美富, 宁芊, 陈炳才, 等. RWPSO与马尔科夫链的无人机航路规划[J]. 哈尔滨工业大学学报, 2019, 51(11): 75-81. |
| HU M F, NING Q, CHEN B C, et al. UAV route planning based on RWPSO and Markov chain[J]. Journal of Harbin Institute of Technology, 2019, 51(11): 75-81. | |
| [13] | SHIRSAT A, ELAMVAZHUTHI K, BERMAN S. Multi-robot target search using probabilistic consensus on discrete Markov chains[C]// Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics, Abu Dhabi, Nov 4-6, 2020. Piscataway: IEEE, 2020: 108-115. |
| [14] | 张文旭, 马磊, 贺荟霖, 等. 强化学习的地-空异构多智能体协作覆盖研究[J]. 智能系统学报, 2018, 13(2): 202-207. |
| ZHANG W X, MA L, HE H L, et al. Air-ground heterogeneous coordination for multi-agent coverage based on reinforced learning[J]. CAAI Transactions on Intelligent Systems, 2018, 13(2): 202-207. | |
| [15] | MASKE H, KIESON E, CHOWDHARY G, et al. Learning task-based instructional policy for excavator-like robots[C]// Proceedings of the 2018 IEEE International Conference on Robotics and Automation, Brisbane, May 21-25, 2018. Piscataway: IEEE, 2018: 1962-1969. |
| [16] | DORIGO M, MANIEZZO V, COLORNI A. Ant system: optimization by a colony of cooperating agents[J]. IEEE Transactions on Systems, Man, and Cybernetics: Part B Cybernetics, 1996, 26(1): 29-41. |
| [17] | CHENG J, WANG B. Flocking control of mobile robots with obstacle avoidance based on simulated annealing algorithm[J]. Mathematical Problems in Engineering, 2020. DOI: 10.1155/2020/7357464. |
| [18] | CHEN G L, LIU J. Mobile robot path planning using ant colony algorithm and improved potential field method[J]. Computational Intelligence and Neuroscience, 2019. DOI: 10.1155/2019/1932812. |
| [19] | SALIMI N, RAFE V, TABRIZCHI H, et al. Fuzzy genetic algorithm approach for verification of reachability and detection of deadlock in graph transformation systems[C]// Proceedings of the 2020 IEEE 3rd International Conference and Workshop in Óbuda on Electrical and Power Engineering, Budapest, 2020. Washington:IEEE Computer Society, 2020: 241-250. |
| [20] | DAI X L, LONG S, ZHANG Z W, et al. Mobile robot path planning based on ant colony algorithm with A* heuristic method[J]. Frontiers in Neurorobotics, 2019, 13: 15. |
| [21] | DE ALMEIDA J P L S, NAKASHIMA R T, NEVES-JR F, et al. Bio-inspired on-line path planner for cooperative exploration of unknown environment by a multi-robot system[J]. Robotics and Autonomous Systems, 2019, 112: 32-48. |
| [22] | WU Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission[J]. Ocean Engineering, 2019, 182: 162-173. |
| [23] | KRELL E, SHETA A, BALASUBRAMANIAN A P R, et al. Collision-free autonomous robot navigation in unknown environments utilizing PSO for path planning[J]. Journal of Artificial Intelligence and Soft Computing Research, 2019, 9(4): 267-282. |
| [24] | WANG L J, GUO J, WANG Q, et al. Ground robot path planning based on simulated annealing genetic algorithm[C]// Proceedings of the 2018 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, Zhengzhou, Oct 18-20, 2018. Piscataway: IEEE, 2018: 417-424. |
| [25] | BASBOUS B. 2D UAV path planning with radar threatening areas using simulated annealing algorithm for event detection[C]// Proceedings of the 2018 International Conference on Artificial Intelligence and Data Processing, Malatya, Sep 28-30, 2018. Piscataway: IEEE, 2018: 1-7. |
| [26] | 邓力恺. 无人机集群智能规划系统研究[D]. 成都: 电子科技大学, 2020. |
| DENG L K. Research on intelligent planning system of UAVs[D]. Chengdu: University of Electronic Science and Technology of China, 2020. | |
| [27] | GUL F, RAHIMAN W, SYED HASSAN S S N A, et al. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO-GWO optimization algorithm with evolutionary programming[J]. Journal of Ambient Intelligence and Humanized Computing, 2021, 12(7): 7873-7890. |
| [28] | LIU X Z, HAN Y, CHEN J, et al. Discrete pigeon inspired simulated annealing algorithm and contract net algorithm based on multi-objective optimization for task allocation of UAV formation[C]// Proceedings of the 12th International Joint Conference on Computational Intelligence, Budapest, Nov 2-4, 2020: 176-183. |
| [29] | WAHBY M, WEINHOLD A, HAMANN H. Revisiting BEECLUST: aggregation of swarm robots with adaptiveness to different light settings[J]. EAI Endorsed Transactions on Collaborative Computing, 2016, 2(9): e1. |
| [30] | KENGYEL D, ZAHADAT P, WOTAWA F, et al. Towards swarm level optimisation: the role of different movement patterns in swarm systems[J]. International Journal of Parallel, Emergent and Distributed Systems, 2019, 34(3): 241-259. |
| [31] | KENGYEL D, THENIUS R, CRAILSHEIM K, et al. Influence of a social gradient on a swarm of agents controlled by the BEECLUST algorithm[C]//Proceedings of the 12th European Conference on the Synthesis and Simulation of Living Systems:Advances in Artificial Life, Sicily, Sep 2-6, 2013: 1041-1048. |
| [32] | European Commission, CORDIS. Underwater robot swarms use collective cognition to perform tasks[EB/OL]. ( 2015-05-27) [2021-12-27]. https://digital-strategy.ec.europa.eu/en/news/cocoro-robot-swarms-use-collective-cognition-perform-tasks. |
| [33] | AMJADI A S, RAOUFI M, TURGUT A E, et al. Cooperative pollution source localization and cleanup with a bio-inspired swarm robot aggregation[J]. arXiv:1907.09585, 2019. |
| [34] | ROEN H H, VARANKIAN V V, NICHELE S, et al. Gathering of the Hive: investigating the clustering behaviour of honeybees through art and swarm robotics[C]// Proceedings of the 2019 Conference on Artificial Life, Newcastle, 2019. Cambridge:MIT Press, 2019: 505-506. |
| [35] | HE S T, BASTANI F, BALASINGAM A, et al. BeeCluster: drone orchestration via predictive optimization[C]// Proceedings of the 18th Annual International Conference on Mobile Systems, Applications, and Services, Toronto, Jun 15-19, 2020. New York: ACM, 2020: 299-311. |
| [36] | SHAH D, VACHHANI L. Swarm aggregation without communication and global positioning[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 886-893. |
| [37] | NOVISCHI D M, FLOREA A M. Decentralized swarm aggregation and dispersion with inter-member collision avoidance for non-holonomic multi-robot systems[C]// Proceedings of the 14th IEEE International Conference on Intelligent Computer Communication and Processing, Cluj-Napoca, Sep 6-8, 2018. Piscataway: IEEE, 2018: 89-95. |
| [38] | ZHANG J, YAN J, ZHANG P. Fixed-wing UAV formation control design with collision avoidance based on an improved artificial potential field[J]. IEEE Access, 2018, 6: 78342-78351. |
| [39] | ZHANG T J. Unmanned aerial vehicle formation inspired by bird flocking and foraging behavior[J]. International Journal of Automation and Computing, 2018, 15(4): 402-416. |
| [40] | 程旗, 岳碧波. 无人机自主编队的人工力场控制方法[J]. 兵器装备工程学报, 2018, 39(8): 88-91. |
| CHENG Q, YUE B B. Artificial potential fields control method of UAV autonomous formation[J]. Journal of Ordnance Equipment Engineering, 2018, 39(8): 88-91. | |
| [41] | SUN X M, GE S S, XU Q. Neural network based adaptive region tracking control for a swarm of ships in constrained space[C]// Proceedings of the 2018 10th International Conference on Advanced Computational Intelligence, Xiamen, Mar 29-31, 2018. Piscataway: IEEE, 2018: 364-369. |
| [42] | 黄东晋, 段思文, 雷雪, 等. 基于Voronoi图的群体队形控制方法[J]. 计算机应用, 2019, 39(6): 1799-1803. |
| HUANG D J, DUAN S W, LEI X, et al. Group formation control method based on Voronoi diagram[J]. Journal of Computer Applications, 2019, 39(6): 1799-1803. | |
| [43] | FEDELE G, D'ALFONSO L. A model for swarm formation with reference tracking[C]// Proceedings of the 56th IEEE Annual Conference on Decision and Control, Melbourne, Dec 12-15, 2017. Piscataway: IEEE, 2017: 381-386. |
| [44] | FEDELE G, D'ALFONSO L. A kinematic model for swarm finite-time trajectory tracking[J]. IEEE Transactions on Cybernetics, 2018, 49(10): 3806-3815. |
| [45] | RAOUFI M, TURGUT A E, ARVIN F. Self-organized collective motion with a simulated real robot swarm[C]// LNCS 11649: Proceedings of the 20th Annual Conference on Towards Autonomous Robotic Systems, London, Jul 3-5, 2019. Cham: Springer, 2019: 263-274. |
| [46] | LYU H, YIN Y. Ship’s trajectory planning for collision avoidance at sea based on modified artificial potential field[C]// Proceedings of the 2nd International Conference on Robotics and Automation Engineering, Shanghai, Dec 29-31, 2017. Piscataway: IEEE, 2017: 351-357. |
| [47] | REYNOLDS C W. Flocks, herds and schools: a distributed behavioral model[C]// Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, Jul 27-31, 1987. New York: ACM, 1987: 25-34. |
| [48] | VICSEK T, CZIRÓK A, BEN-JACOB E, et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75(6): 1226-1229. |
| [49] | CUCKER F, SMALE S. Emergent behavior in flocks[J]. IEEE Transactions on Automatic Control, 2007, 52(5): 852-862. |
| [50] | COUZIN I D, KRAUSE J, JAMES R, et al. Collective memory and spatial sorting in animal groups[J]. Journal of Theoretical Biology, 2002, 218(1): 1-11. |
| [51] | 韩莉淼, 杨中元, 耿显亚. 基于数学建模的集群运动模拟仿真研究[J]. 数学学习与研究, 2019(6): 14-15. |
| HAN L M, YANG Z Y, GENG X Y. Simulation of collective motion based on mathematical modeling[J]. Mathematical Learning and Research, 2019(6): 14-15. | |
| [52] | 李丹. 一类变速率多主体系统的同步问题研究[D]. 合肥: 中国科学院大学, 2015. |
| LI D. Research on synchronization of a class of variable rate multi-agent systems[D]. Hefei: University of Chinese Academy of Sciences, 2015. | |
| [53] | ZHANG X, JIA S, LI X. Improving the synchronization speed of self-propelled particles with restricted vision via randomly changing the line of sight[J]. Nonlinear Dynamics, 2017, 90(1): 43-51. |
| [54] | 李玉剑, 田宝美, 杨维维, 等. 视角在趋同集群运动中的影响[C]// 中国空天安全会议:空天资源的可持续发展, 烟台, 2015. 北京:科学出版社, 2015: 252-255. |
| LI Y J, TIAN B M, YANG W W, et al. The influence of perspective on convergence collective movement[C]// China Aerospace Safety Conference: Sustainable Development of Aerospace Resources, Yantai, 2015. Beijing: Science Press, 2015: 252-255. | |
| [55] | WANG T, PENG X G, WU Y P, et al. A GP based two-layer framework for data-driven modeling of swarm self-organizing rules[C]// Proceedings of the 2019 IEEE Congress on Evolutionary Computation, Wellington, Jun 10-13, 2019. Piscataway: IEEE, 2019: 174-181. |
| [56] | VÁSÁRHELYI G, VIRÁGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3(20): 3536. |
| [57] | CHO Y P, LI Z C. Emergent behavior of Cucker-Smale flocking particles with heterogeneous time delays[J]. Applied Mathematics Letters, 2018, 86: 49-56. |
| [58] | GIREJKO E, MACHADO L, MALINOWSKA A B, et al. On consensus in the Cucker-Smale type model on isolated time scales[J]. Discrete & Continuous Dynamical Systems, 2018, 11(1): 77-89. |
| [59] | MA J, LAI M K. Finite-time flocking control of a swarm of Cucker-smale agents with collision avoidance[C]// Proceedings of the 24th International Conference on Mechatronics and Machine Vision in Practice, Auckland, Nov 21-23, 2017. Piscataway: IEEE, 2017: 1-6. |
| [60] | CANALE E, DALMAO F, MORDECKI E, et al. Robustness of Cucker-Smale flocking model[J]. IET Control Theory & Applications, 2015, 9(3): 346-350. |
| [61] | LERMAN K, GALSTYAN A. A general methodology for mathematical analysis of multi-agent systems: ISI-TR-529[R]. Marina del Rey: USC Information Sciences Institute, 2001. |
| [62] | ROY S, ANNUNZIATO M, BORZÌ A, et al. A Fokker-Planck approach to control collective motion[J]. Computational Optimization and Applications, 2018, 69(2): 423-459. |
| [63] | TURING A M. The chemical basis of morphogenesis[J]. Philosophical Transactions of the Royal Society of London, 1952, 237(641): 37-72. |
| [64] | CARRILLO-ZAPATA D, CARRANZA N, DIEGO X, et al. Morphogenesis in robot swarms[J]. Science Robotics, 2018, 3(25): 9178. |
| [65] | SHIRAZI A R, JIN Y C. Regulated morphogen gradients for target surrounding and adaptive shape formation[J]. IEEE Transactions on Cognitive and Developmental Systems, 2021, 13(4): 818-826. |
| [66] | ELAMVAZHUTHI K, KUIPER H, BERMAN S. PDE-based optimization for stochastic mapping and coverage strategies using robotic ensembles[J]. Automatica, 2018, 95: 356-367. |
| [67] | 郭莉菲, 田玉平. 多机器人协同搜索过程中的队形部署[J]. 工业控制计算机, 2014, 27(5): 90-93. |
| GUO L F, TIAN Y P. Formation deployment of multiple robots in cooperative seeking process[J]. Industrial Control Computer, 2014, 27(5): 90-93. | |
| [68] | HAMANN H. Swarm robotics: a formal approach[M]. Berlin, Heidelberg: Springer, 2018. |
| [69] | ELAMVAZHUTHI K, KUIPER H, BERMAN S. Controllability to equilibria of the 1-D Fokker-Planck equation with zero-flux boundary condition[C]// Proceedings of the 56th IEEE Annual Conference on Decision and Control, Melbourne, Dec 12-15, 2017. Piscataway: IEEE, 2017: 2485-2491. |
| [70] | SHIRI H, PARK J, BENNIS M. Massive autonomous UAV path planning: a neural network based mean-field game theoretic approach[C]// Proceedings of the 2019 IEEE Global Communications Conference, Waikoloa, Dec 9-13, 2019. Piscataway: IEEE, 2019: 1-6. |
| [71] | LI J, TAN Y. A two-stage imitation learning framework for the multi-target search problem in swarm robotics[J]. Neurocomputing, 2019, 334: 249-264. |
| [72] | SOYSAL O, BAHÇECI E, ŞAHIN E. Aggregation in swarm robotic systems: evolution and probabilistic control[J]. Turkish Journal of Electrical Engineering & Computer Sciences, 2007, 15(2): 199-225. |
| [73] | TRIANNI V, LOPEZ-IBANEZ M. Advantages of task-specific multi-objective optimisation in evolutionary robotics[J]. PLoS ONE, 2015, 10: e0136406. |
| [74] | KATADA Y. Evolutionary design method of probabilistic finite state machine for swarm robots aggregation[J]. Artificial Life and Robotics, 2018, 23(4): 600-608. |
| [75] | SILVA F, URBANO P, CORREIA L, et al. odNEAT: an algorithm for decentralised online evolution of robotic controllers[J]. Evolutionary Computation, 2015, 23(3): 421-449. |
| [76] | NEUPANE A, GOODRICH M A. Learning swarm behaviors using grammatical evolution and behavior trees[C]// Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, Aug 10-16, 2019: 513-520. |
| [77] | GUPTA J K, EGOROV M, KOCHENDERFER M J. Cooperative multi-agent control using deep reinforcement learning[C]// LNCS 10642: Proceedings of the 2017 International Conference on Autonomous Agents and Multiagent Systems, São Paulo, May 8-12, 2017. Cham: Springer, 2017: 66-83. |
| [78] | LOWE R, WU Y, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments[J]. arXiv:1706.02275, 2017. |
| [79] | FOERSTER J N, FARQUHAR G, AFOURAS T, et al. Counterfactual multi-agent policy gradients[C]// Proceedings of the 32nd AAAI Conference on Artificial Intelligence, the 30th Innovative Applications of Artificial Intelligence, and the 8th AAAI Symposium on Educational Advances in Artificial Intelligence, New Orleans, Feb 2-7, 2018. Menlo Park: AAAI, 2018: 2974-2982. |
| [80] | YU C, VELU A, VINITSKY E, et al. The surprising effectiveness of MAPPO in cooperative, multi-agent games[J]. arXiv:2103.01955, 2021. |
| [81] | ZHU P, DAI W, YAO W, et al. Multi-robot flocking control based on deep reinforcement learning[J]. IEEE Access, 2020, 8: 150397-150406. |
| [82] | KONG W R, ZHUO D Y, YANG Z. Air combat strategies generation of CGF based on MADDPG and reward shaping[C]// Proceedings of the 2020 International Conference on Computer Vision, Image and Deep Learning, Chongqing, Jul 10-12, 2020. Piscataway: IEEE: 651-655. |
| [83] | WU T H, JIANG M Z, ZHANG L. Cooperative multiagent deep deterministic policy gradient (CoMADDPG) for intelligent connected transportation with unsignalized intersection[J]. Mathematical Problems in Engineering, 2020. DOI: 10.1155/2020/1820527. |
| [84] | CHEN W B, HUA L, XU L X, et al. MADDPG algorithm for coordinated welding of multiple robots[C]// Proceedings of the 6th International Conference on Automation, Control and Robotics Engineering, Dalian, Jul 15-17, 2021. Piscataway: IEEE, 2021: 1-5. |
| [85] | JADERBERG M, CZARNECKI W M, DUNNING I, et al. Human-level performance in 3D multiplayer games with population-based reinforcement learning[J]. Science, 2019, 364(6443): 859-865. |
| [86] | AMIN S, ELAHI A, SAGHAR K, et al. Formal modelling and verification approach for improving probabilistic behaviour of robot swarms[C]// Proceedings of the 14th International Bhurban Conference on Applied Sciences and Technology, Islamabad, Jan 10-14, 2017. Piscataway: IEEE, 2017: 392-400. |
| [1] | 裴利沈, 赵雪专. 群体行为识别深度学习方法研究综述[J]. 计算机科学与探索, 2022, 16(4): 775-790. |
| [2] | 郭银景,孟庆良,孔芳,吕文红. AUV路径规划算法研究现状与展望[J]. 计算机科学与探索, 2020, 14(12): 1981-1994. |
| [3] | 王珉,王永滨. 网络音乐标签效用度和稳定性研究[J]. 计算机科学与探索, 2015, 9(5): 535-545. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||