
Journal of Frontiers of Computer Science and Technology ›› 2022, Vol. 16 ›› Issue (12): 2820-2831.DOI: 10.3778/j.issn.1673-9418.2107086
• Artificial Intelligence • Previous Articles Next Articles
ZHANG Songcan1,2, SUN Lifan1,+( ), SI Yanna1, PU Jiexin1
), SI Yanna1, PU Jiexin1
Received:2021-07-22
Revised:2021-09-29
Online:2022-12-01
Published:2021-10-18
About author:ZHANG Songcan, born in 1973, Ph.D. candidate. His research interests include swarm intelligence algorithms and intelligent control of mobile robot.Supported by:
张松灿1,2, 孙力帆1,+(), 司彦娜1, 普杰信1
通讯作者:
+E-mail: lifan.sun@gmail.com作者简介:张松灿(1973—),男,河南郑州人,博士研究生,主要研究方向为群智能算法、移动机器人智能控制。基金资助:CLC Number:
ZHANG Songcan, SUN Lifan, SI Yanna, PU Jiexin. Single-Colony Adaptive Heterogeneous Ant Colony Algorithm for Mobile Robot Path Planning[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(12): 2820-2831.
张松灿, 孙力帆, 司彦娜, 普杰信. 单种群自适应异构蚁群算法的机器人路径规划[J]. 计算机科学与探索, 2022, 16(12): 2820-2831.
Add to citation manager EndNote|Ris|BibTeX
URL: http://fcst.ceaj.org/EN/10.3778/j.issn.1673-9418.2107086
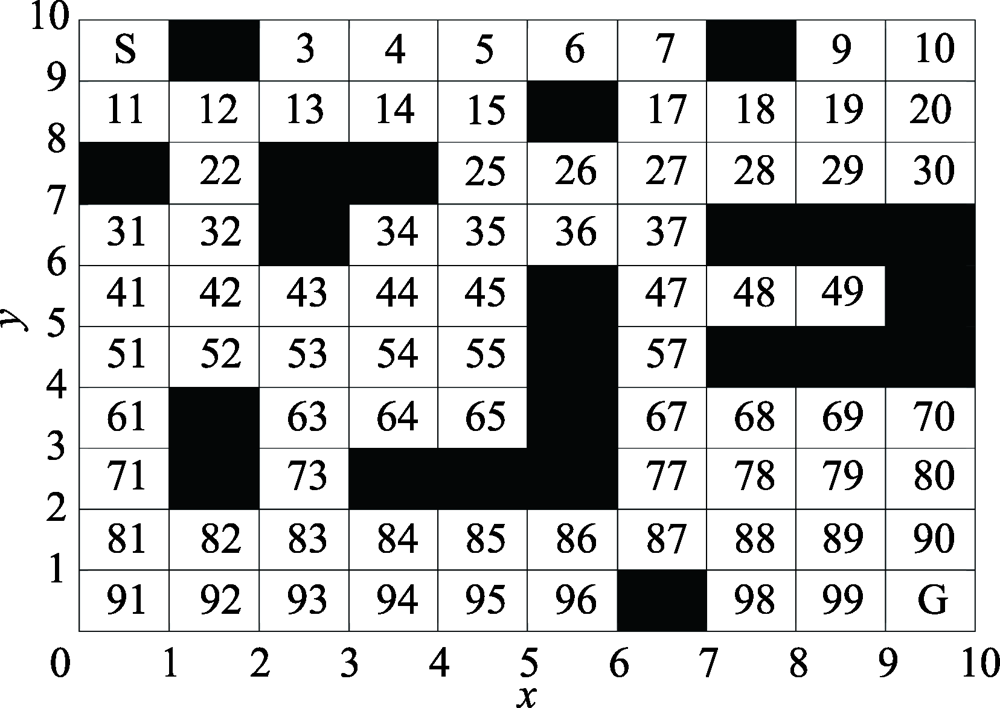
Fig.1 Example of grid-based environment
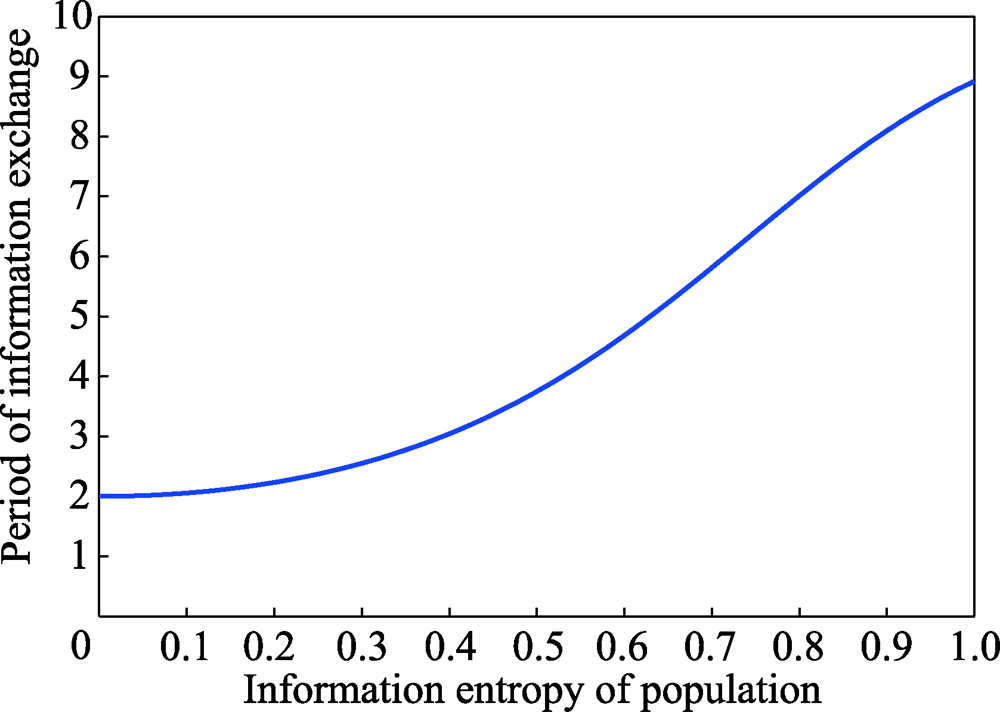
Fig.2 Curve of information exchange period
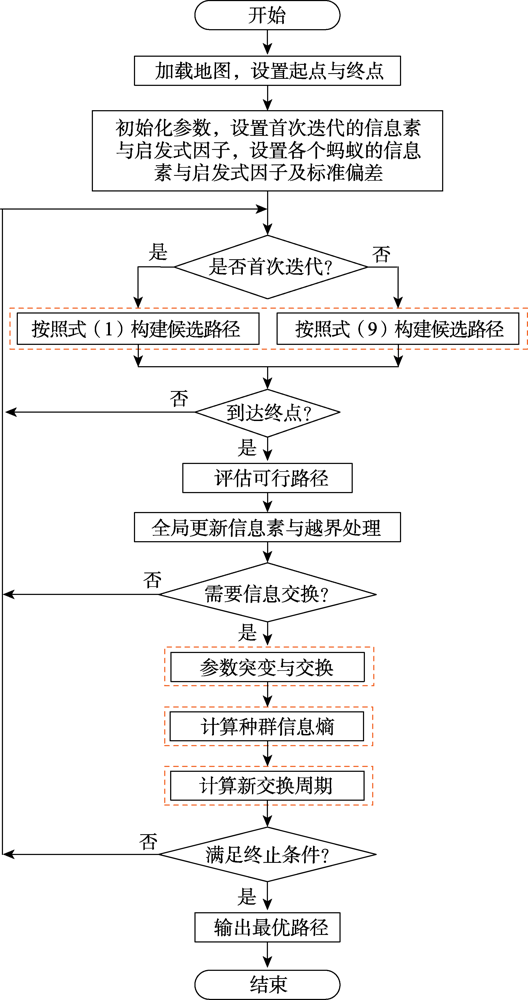
Fig.3 Flowchart of AHACO for path planning
| 算法 | |||||
|---|---|---|---|---|---|
| MMAS | 1.1 | 7 | 0.200 | — | — |
| ACS | 1.1 | 7 | 0.200 | 0.2 | 0.8 |
| CACS | 1.0 | 4 | 0.100 | 0.3 | 0.8 |
| PS-ACO | 1.0 | 2 | 0.015 | — | — |
| AHACO | 1.1 | 7 | 0.200 | — | — |
Table 1 Parameter setting of algorithms
| 算法 | |||||
|---|---|---|---|---|---|
| MMAS | 1.1 | 7 | 0.200 | — | — |
| ACS | 1.1 | 7 | 0.200 | 0.2 | 0.8 |
| CACS | 1.0 | 4 | 0.100 | 0.3 | 0.8 |
| PS-ACO | 1.0 | 2 | 0.015 | — | — |
| AHACO | 1.1 | 7 | 0.200 | — | — |

Fig.4 Optimal path generated by AHACO under grid map1

Fig.5 Optimal path generated by AHACO under grid map2
| 信息交换周期 | best | mean | std | fbest | rate/% |
|---|---|---|---|---|---|
| 2 | 45.698 5 | 45.891 8 | 0.356 4 | 25.13 | 76.67 |
| 4 | 45.698 5 | 45.891 8 | 0.356 4 | 24.97 | 76.67 |
| 6 | 45.698 5 | 45.891 8 | 0.356 4 | 27.03 | 76.60 |
| 8 | 45.698 5 | 45.891 8 | 0.356 4 | 25.50 | 76.67 |
| 10 | 45.698 5 | 45.891 8 | 0.356 4 | 25.90 | 76.67 |
| 12 | 45.698 5 | 45.891 8 | 0.356 4 | 25.17 | 76.67 |
| Adaptive | 45.698 5 | 45.792 8 | 0.248 6 | 37.03 | 86.67 |
Table 2 Statistical results of different periods for information exchange in map1
| 信息交换周期 | best | mean | std | fbest | rate/% |
|---|---|---|---|---|---|
| 2 | 45.698 5 | 45.891 8 | 0.356 4 | 25.13 | 76.67 |
| 4 | 45.698 5 | 45.891 8 | 0.356 4 | 24.97 | 76.67 |
| 6 | 45.698 5 | 45.891 8 | 0.356 4 | 27.03 | 76.60 |
| 8 | 45.698 5 | 45.891 8 | 0.356 4 | 25.50 | 76.67 |
| 10 | 45.698 5 | 45.891 8 | 0.356 4 | 25.90 | 76.67 |
| 12 | 45.698 5 | 45.891 8 | 0.356 4 | 25.17 | 76.67 |
| Adaptive | 45.698 5 | 45.792 8 | 0.248 6 | 37.03 | 86.67 |
| 信息交换周期 | best | mean | std | fbest | rate/% |
|---|---|---|---|---|---|
| 2 | 73.982 8 | 74.671 7 | 0.592 2 | 53.63 | 33.33 |
| 4 | 73.982 8 | 74.605 1 | 0.550 7 | 54.57 | 36.67 |
| 6 | 73.982 8 | 74.605 1 | 0.550 7 | 54.03 | 36.67 |
| 8 | 73.982 8 | 74.605 1 | 0.550 7 | 52.73 | 36.67 |
| 10 | 73.982 8 | 74.605 1 | 0.550 7 | 54.00 | 36.67 |
| 12 | 73.982 8 | 74.605 1 | 0.550 7 | 57.70 | 36.67 |
| Adaptive | 73.982 8 | 74.384 1 | 0.468 8 | 51.43 | 53.33 |
Table 3 Statistical results of different periods for information exchange in map2
| 信息交换周期 | best | mean | std | fbest | rate/% |
|---|---|---|---|---|---|
| 2 | 73.982 8 | 74.671 7 | 0.592 2 | 53.63 | 33.33 |
| 4 | 73.982 8 | 74.605 1 | 0.550 7 | 54.57 | 36.67 |
| 6 | 73.982 8 | 74.605 1 | 0.550 7 | 54.03 | 36.67 |
| 8 | 73.982 8 | 74.605 1 | 0.550 7 | 52.73 | 36.67 |
| 10 | 73.982 8 | 74.605 1 | 0.550 7 | 54.00 | 36.67 |
| 12 | 73.982 8 | 74.605 1 | 0.550 7 | 57.70 | 36.67 |
| Adaptive | 73.982 8 | 74.384 1 | 0.468 8 | 51.43 | 53.33 |

Fig.6 Optimal path generated by AHACO in grid maps with different scales
| Environment | Algorithm | best | mean | std | fbest | rate/% | Environment | Algorithm | best | mean | std | fbest | rate/% |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| map3 | MMAS | 29.799 0 | 29.909 4 | 0.286 4 | 14.97 | 86.67 | map5 | MMAS | 92.526 9 | 95.153 4 | 2.267 4 | 35.93 | 10.00 |
| ACS | 29.799 0 | 29.799 0 | 0 | 32.57 | 100.00 | ACS | 91.698 5 | 93.848 2 | 1.094 4 | 117.10 | 3.33 | ||
| CACS | 29.799 0 | 29.951 8 | 0.296 9 | 38.10 | 76.67 | CACS | 95.598 0 | 99.154 4 | 1.731 9 | 70.17 | 3.33 | ||
| PS-ACO | 30.627 4 | 32.694 9 | 1.689 1 | 16.53 | 10.00 | PS-ACO | 95.840 6 | 100.912 0 | 3.260 0 | 40.00 | 3.33 | ||
| AHACO | 29.799 0 | 29.799 0 | 0 | 19.20 | 100.00 | AHACO | 90.041 6 | 92.268 9 | 0.910 3 | 79.93 | 6.67 | ||
| map4 | MMAS | 58.083 3 | 58.102 8 | 0.106 9 | 44.30 | 96.67 | map6 | MMAS | 90.468 0 | 92.562 0 | 0.813 7 | 37.10 | 3.33 |
| ACS | 58.083 3 | 58.083 3 | 0 | 16.40 | 100.00 | ACS | 90.124 9 | 91.820 0 | 0.848 7 | 74.63 | 3.33 | ||
| CACS | 58.083 3 | 59.841 4 | 0.855 9 | 61.33 | 6.67 | CACS | 94.953 3 | 97.408 5 | 1.261 2 | 22.00 | 6.67 | ||
| PS-ACO | 59.497 4 | 63.837 5 | 2.038 0 | 19.00 | 3.33 | PS-ACO | 93.781 7 | 99.417 4 | 3.162 2 | 90.66 | 3.33 | ||
| AHACO | 58.083 3 | 58.259 0 | 0.273 0 | 44.13 | 70.00 | AHACO | 89.296 5 | 91.213 9 | 0.824 2 | 66.00 | 3.33 |
Table 4 Statistical results of path planning under different grid maps
| Environment | Algorithm | best | mean | std | fbest | rate/% | Environment | Algorithm | best | mean | std | fbest | rate/% |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| map3 | MMAS | 29.799 0 | 29.909 4 | 0.286 4 | 14.97 | 86.67 | map5 | MMAS | 92.526 9 | 95.153 4 | 2.267 4 | 35.93 | 10.00 |
| ACS | 29.799 0 | 29.799 0 | 0 | 32.57 | 100.00 | ACS | 91.698 5 | 93.848 2 | 1.094 4 | 117.10 | 3.33 | ||
| CACS | 29.799 0 | 29.951 8 | 0.296 9 | 38.10 | 76.67 | CACS | 95.598 0 | 99.154 4 | 1.731 9 | 70.17 | 3.33 | ||
| PS-ACO | 30.627 4 | 32.694 9 | 1.689 1 | 16.53 | 10.00 | PS-ACO | 95.840 6 | 100.912 0 | 3.260 0 | 40.00 | 3.33 | ||
| AHACO | 29.799 0 | 29.799 0 | 0 | 19.20 | 100.00 | AHACO | 90.041 6 | 92.268 9 | 0.910 3 | 79.93 | 6.67 | ||
| map4 | MMAS | 58.083 3 | 58.102 8 | 0.106 9 | 44.30 | 96.67 | map6 | MMAS | 90.468 0 | 92.562 0 | 0.813 7 | 37.10 | 3.33 |
| ACS | 58.083 3 | 58.083 3 | 0 | 16.40 | 100.00 | ACS | 90.124 9 | 91.820 0 | 0.848 7 | 74.63 | 3.33 | ||
| CACS | 58.083 3 | 59.841 4 | 0.855 9 | 61.33 | 6.67 | CACS | 94.953 3 | 97.408 5 | 1.261 2 | 22.00 | 6.67 | ||
| PS-ACO | 59.497 4 | 63.837 5 | 2.038 0 | 19.00 | 3.33 | PS-ACO | 93.781 7 | 99.417 4 | 3.162 2 | 90.66 | 3.33 | ||
| AHACO | 58.083 3 | 58.259 0 | 0.273 0 | 44.13 | 70.00 | AHACO | 89.296 5 | 91.213 9 | 0.824 2 | 66.00 | 3.33 |

Fig.7 Convergence curves of algorithms in grid maps with different scales

Fig.8 Population information entropy curves in grid maps with different scales
| 地图 | AHACO vs. MMAS | AHACO vs. ACS | AHACO vs. CACS | AHACO vs. PS-ACO |
|---|---|---|---|---|
| map3 | 4.55E-02 + | 1.00E+00 = | 1.39E-02 + | 1.57E-06 + |
| map4 | 1.14E-02 + | 2.70E-03 + | 1.17E-05 + | 1.17E-05 + |
| map5 | 6.60E-06 + | 3.55E-05 + | 1.73E-06 + | 1.73E-06 + |
| map6 | 3.43E-05 + | 3.05E-02 + | 1.73E-06 + | 1.73E-06 + |
| +/=/- | 4/0/0 | 3/1/0 | 4/0/0 | 4/0/0 |
Table 5 Results of Wilcoxon sign rank test
| 地图 | AHACO vs. MMAS | AHACO vs. ACS | AHACO vs. CACS | AHACO vs. PS-ACO |
|---|---|---|---|---|
| map3 | 4.55E-02 + | 1.00E+00 = | 1.39E-02 + | 1.57E-06 + |
| map4 | 1.14E-02 + | 2.70E-03 + | 1.17E-05 + | 1.17E-05 + |
| map5 | 6.60E-06 + | 3.55E-05 + | 1.73E-06 + | 1.73E-06 + |
| map6 | 3.43E-05 + | 3.05E-02 + | 1.73E-06 + | 1.73E-06 + |
| +/=/- | 4/0/0 | 3/1/0 | 4/0/0 | 4/0/0 |
| AHACO | MMAS | ACS | CACS | PS-ACO | |
|---|---|---|---|---|---|
| 0.006 | 1.625 | 2.750 | 1.625 | 4.000 | 5.000 |
Table 6 Results of Friedman test
| AHACO | MMAS | ACS | CACS | PS-ACO | |
|---|---|---|---|---|---|
| 0.006 | 1.625 | 2.750 | 1.625 | 4.000 | 5.000 |
| [1] |
PEYER S, RAUTENBACH D, VYGEN J. A generalization of Dijkstra’s shortest path algorithm with applications to VLSI routing[J]. Journal of Discrete Algorithms, 2009, 7(4): 377-390.
DOI URL |
| [2] | GURUJI A K, AGARWAL H, PARSEDIYA D. Time-efficient A* algorithm for robot path planning[J]. Procedia Tech-nology, 2016, 23: 144-149. |
| [3] | 黄鲁, 周非同. 基于路径优化D* Lite算法的移动机器人路径规划[J]. 控制与决策, 2020, 35(4): 877-884. |
| HUANG L, ZHOU F T. Path planning of moving robot based on path optimization of D* Lite algorithm[J]. Control and Decision, 2020, 35(4): 877-884. | |
| [4] | SINGH M K, PARHI D R. Path optimisation of a mobile robot using an artificial neural network controller[J]. Inter-national Journal of Systems Science, 2011, 42(1): 107-120. |
| [5] | KARAMI A H, HASANZADEH M. An adaptive genetic algorithm for robot motion planning in 2D complex environ-ments[J]. Computers & Electrical Engineering, 2015, 43: 317-329. |
| [6] |
LEE H Y, SHIN H, CHAE J. Path planning for mobile agents using a genetic algorithm with a direction guided factor[J]. Electronics, 2018, 7(10): 212.
DOI URL |
| [7] |
PRADHAN S K, PARHI D R, PANDA A K. Fuzzy logic tech-niques for navigation of several mobile robots[J]. Applied Soft Computing, 2009, 9(1): 290-304.
DOI URL |
| [8] |
LI G, CHOU W. Path planning for mobile robot using self-adaptive learning particle swarm optimization[J]. Science China Information Sciences, 2018, 61(5): 052204.
DOI URL |
| [9] | 王晓燕, 杨乐, 张宇, 等. 基于改进势场蚁群算法的机器人路径规划[J]. 控制与决策, 2018, 33(10): 1775-1781. |
| WANG X Y, YANG L, ZHANG Y, et al. Robot path plan-ning based on improved ant colony algorithm with poten-tial field heuristic[J]. Control and Decision, 2018, 33(10): 1775-1781. | |
| [10] |
朱佳莹, 高茂庭. 融合粒子群与改进蚁群算法的AUV路径规划算法[J]. 计算机工程与应用, 2021, 57(6): 267-273.
DOI |
|
ZHU J Y, GAO M T. AUV path planning based on particle swarm optimization and improved ant colony optimization[J]. Computer Engineering and Applications, 2021, 57(6): 267-273.
DOI |
|
| [11] | 陈雄, 袁杨. 一种机器人路径规划的蚁群算法[J]. 系统工程与电子技术, 2008, 30(5): 952-955. |
| CHEN X, YUAN Y. Novel ant colony optimization algori-thm for robot path planning[J]. Journal of Systems Enginee-ring and Electronics, 2008, 30(5): 952-955. | |
| [12] |
BAI J, YANG G K, CHEN Y W, et al. A model induced max-min ant colony optimization for asymmetric traveling salesman problem[J]. Applied Soft Computing, 2013, 13(3): 1365-1375.
DOI URL |
| [13] |
LEE J. Heterogeneous-ants-based path planner for global path planning of mobile robot applications[J]. International Journal of Control, Automation and Systems, 2017, 15(4): 1754-1769.
DOI URL |
| [14] |
SREEJA N, SANKAR A. A hierarchical heterogeneous ant colony optimization based approach for efficient action rule mining[J]. Swarm and Evolutionary Computation, 2016, 29: 1-12.
DOI URL |
| [15] |
张德惠, 游晓明, 刘升. 融合猫群算法的动态分组蚁群算法[J]. 计算机科学与探索, 2020, 14(5): 880-891.
DOI URL |
|
ZHANG D H, YOU X M, LIU S. Dynamic grouping ant colony algorithm combined with cat swarm optimization[J]. Journal of Frontiers of Computer Science and Technology, 2020, 14(5): 880-891.
DOI URL |
|
| [16] |
ZHANG D, YOU X, LIU S, et al. Dynamic multi-role adap-tive collaborative ant colony optimization for robot path planning[J]. IEEE Access, 2020, 8: 129958-129974.
DOI URL |
| [17] |
GÜLCÜ Ş, MAHI M, BAYKAN Ö K. et al. A parallel coope-rative hybrid method based on ant colony optimization and 3-Opt algorithm for solving traveling salesman problem[J]. Soft Computing, 2018, 22(5): 1669-1685.
DOI URL |
| [18] | 万正宜, 彭玉旭. 求解旅行商问题的改进型量子蚁群算法[J]. 计算机工程与应用, 2016, 52(22): 59-63. |
| WAN Z Y, PENG Y X. Improved quantum ant colony algo-rithm for traveling salesman problem[J]. Computer Enginee-ring and Applications, 2016, 52(22): 59-63. | |
| [19] |
MAHI M, BAYKAN Ö K, KODAZ H. A new hybrid met-hod based on particle swarm optimization, ant colony opti-mization and 3-opt algorithms for traveling salesman pro-blem[J]. Applied Soft Computing, 2015, 30: 484-490.
DOI URL |
| [20] |
STÜTZLE T, HOOS H H. MAX-MIN ant system[J]. Future Generation Computer Systems, 2000, 16(8): 889-914.
DOI URL |
| [21] |
张松灿, 普杰信, 司彦娜, 等. 基于种群相似度的自适应改进蚁群算法及应用[J]. 计算机工程与应用, 2021, 57(8): 70-77.
DOI |
| ZHANG S C, PU J X, SI Y N, et al. Adaptive improved ant colony algorithm based on population similarity and its appli-cation[J]. Computer Engineering and Applications, 2021, 57(8): 70-77. | |
| [22] | 刘广瑞, 刘军, 孔令云. 移动机器人路径规划蚁群算法及其收敛性分析[J]. 郑州大学学报(工学版), 2012, 33(2): 24-27. |
| LIU G R, LIU J, KONG L Y. Ant colony algorithm of path planning for robot and its convergence analysis[J]. Journal of Zhengzhou University (Engineering Science), 2012, 33(2): 24-27. | |
| [23] |
SHUANG B, CHEN J, LI Z. Study on hybrid PS-ACO algo-rithm[J]. Applied Intelligence, 2011, 34(1): 64-73.
DOI URL |
| [24] |
DERRAC J, GARCÍA S, MOLINA D, et al. A practical tuto-rial on the use of nonparametric statistical tests as a metho-dology for comparing evolutionary and swarm intelligence algorithms[J]. Swarm and Evolutionary Computation, 2011, 1(1): 3-18.
DOI URL |
| [1] | ZHANG Shuohang, GUO Gaizhi. Review of Multiple Traveling Salesman Model and Its Application [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1516-1528. |
| [2] | ZHAO Jiabo, YOU Xiaoming, LIU Sheng. Ant Colony Algorithm Based on Price Fluctuation Strategy and Dynamic Backtracking Mechanism [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(6): 1390-1404. |
| [3] | CHEN Da, YOU Xiaoming, LIU Sheng. Dual Ant Colony Algorithm Based on Backtracking Migration and Matching Learning [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(12): 2797-2808. |
| [4] | CAO Kai, CHEN Yangquan, GAO Song, GAO Jiajia. Vortex Artificial-Potential-Field Guided RRT* for Path Planning of Mobile Robot [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(4): 723-732. |
| [5] | MENG Jingwen, YOU Xiaoming, LIU Sheng. Double Ant Colony Algorithm Based on Collaborative Mechanism and Dynamic Regulation Strategy [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(11): 2206-2221. |
| [6] | ZHANG Qing, LIU Xu, PENG Li, ZHU Fengzeng. Path Planning for Mobile Robots Based on JPS and Improved A* Algorithm [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(11): 2233-2240. |
| [7] | YIN Shaowei, PENG Li, DAI Feifei. Smooth Path Planning Based on Improved A* Ant Colony and Rolling Window Method [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(10): 1969-1979. |
| [8] | GUO Jia, MA Chaobin, ZHANG Shaobo, MIAO Mengmeng. Optimized Artificial Bee Colony Algorithm with Markov Chain [J]. Journal of Frontiers of Computer Science and Technology, 2020, 14(6): 985-995. |
| [9] | PAN Han, YOU Xiaoming, LIU Sheng. Double-Type Ant Colony Algorithm Considering Dynamic Guidance and Neighborhood Interaction [J]. Journal of Frontiers of Computer Science and Technology, 2020, 14(6): 1005-1016. |
| [10] | FENG Zhiyu, YOU Xiaoming, LIU Sheng. Hierarchical Progressive Improved Clustering Ant Colony Algorithm for Solving TSP Problems [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(8): 1280-1294. |
| [11] | LIU Xinyu, TAN Liming, YANG Chunxi, ZHAI Chi. Self-Adjustable Dynamic Path Planning of Unknown Environment Based on Ant Colony-Clustering Algorithm [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(5): 846-857. |
| [12] | CHAO Xiuqin, LI Wei. Feature Selection Method Optimized by Artificial Bee Colony Algorithm [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(2): 300-309. |
| [13] | ZHU Hongwei, YOU Xiaoming, LIU Sheng. Heterogeneous Dual Population Ant Colony Algorithm Based on Cooperative Filtering Strategy [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(10): 1754-1767. |
| [14] | ZHU Huanxiong, LIU Bo. Outlier Detection Based on Artificial Bee Colony Intelligent Technology [J]. Journal of Frontiers of Computer Science and Technology, 2017, 11(12): 1984-1992. |
| [15] | XIA Kefu, LI Pengfei, CHEN Xiaoping. People Tracking of Mobile Robot Using Improved Particle Filter [J]. Journal of Frontiers of Computer Science and Technology, 2017, 11(11): 1849-1859. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
/D:/magtech/JO/Jwk3_kxyts/WEB-INF/classes/