
Journal of Frontiers of Computer Science and Technology ›› 2022, Vol. 16 ›› Issue (1): 205-216.DOI: 10.3778/j.issn.1673-9418.2008003
• Graphics and Image • Previous Articles Next Articles
CAO Yiqin, LIU Longbiao+( ), HE Tian, DING Yaonan
), HE Tian, DING Yaonan
Received:2020-08-03
Revised:2020-09-30
Online:2022-01-01
Published:2020-10-23
About author:CAO Yiqin, born in 1964, M.S., professor, M.S. supervisor, member of CCF. His research interests include image processing and pattern recognition.Supported by:
曹义亲, 刘龙标+(), 何恬, 丁要男
通讯作者:
+ E-mail: 569144312@qq.com作者简介:曹义亲(1964—),男,江西九江人,硕士,教授,硕士生导师,CCF会员,主要研究方向为图像处理、模式识别。基金资助:CLC Number:
CAO Yiqin, LIU Longbiao, HE Tian, DING Yaonan. Method of Rail Surface Extraction Based on Greedy Selection and Slope Detection Expansion[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(1): 205-216.
曹义亲, 刘龙标, 何恬, 丁要男. 基于贪心选择及斜率探测扩充的轨面提取方法[J]. 计算机科学与探索, 2022, 16(1): 205-216.
Add to citation manager EndNote|Ris|BibTeX
URL: http://fcst.ceaj.org/EN/10.3778/j.issn.1673-9418.2008003

Fig.1 Rail image collected in practical environment

Fig.2 Gray scale distribution of rail image

Fig.3 Three color spaces exploration of rail images
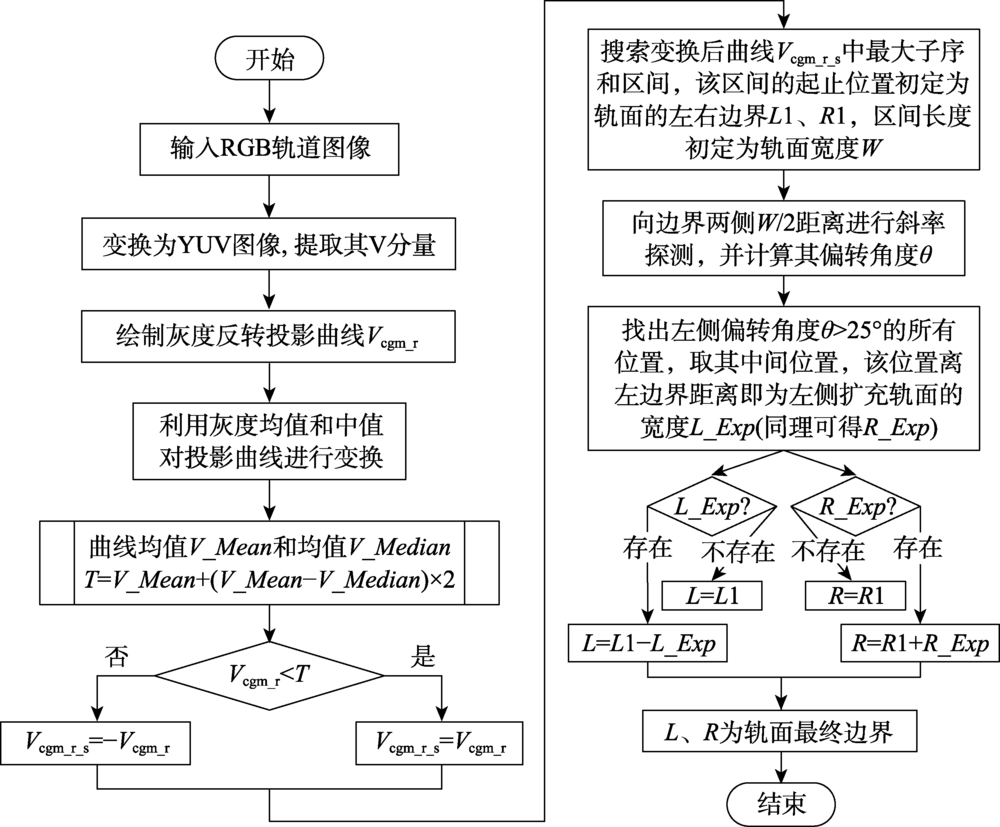
Fig.4 Flow chart of rail surface extraction algorithm
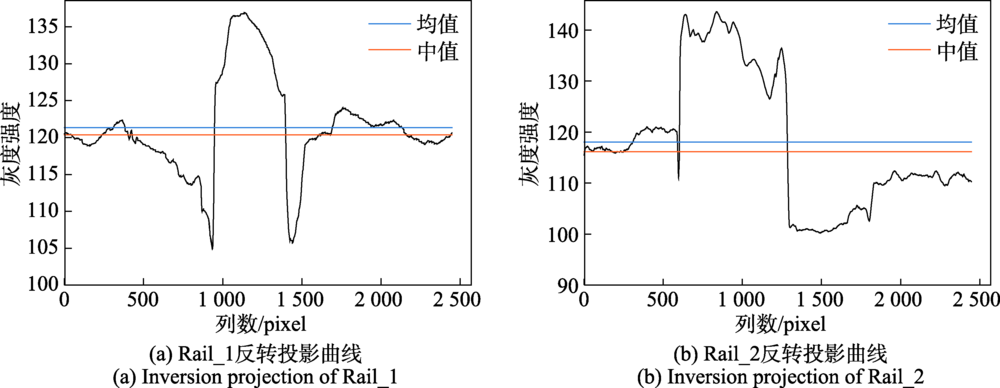
Fig.5 Grayscale inversion projection curve of rail image
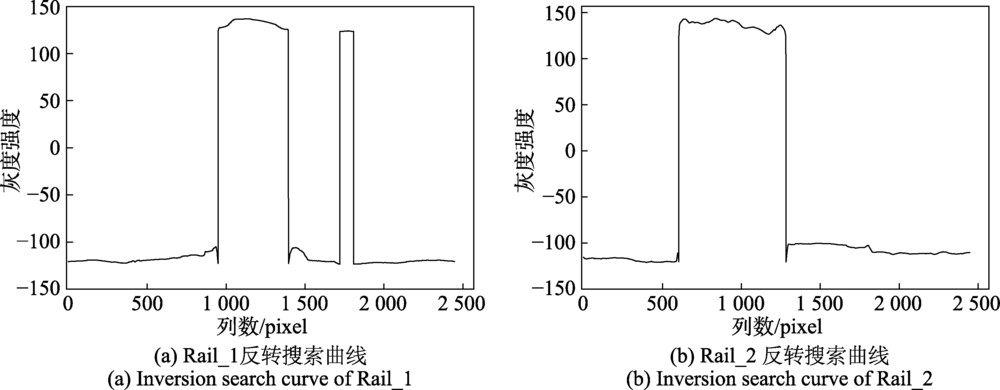
Fig.6 Grayscale inversion projection search curve of V component
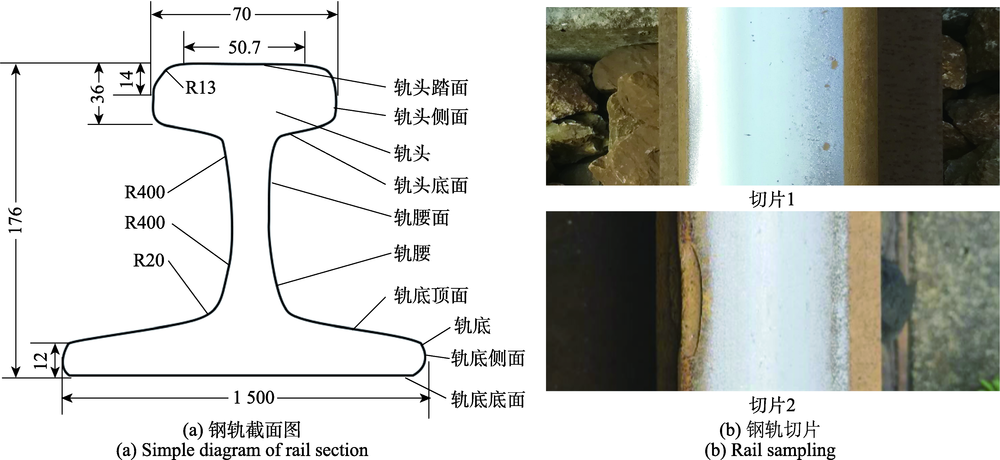
Fig.7 Analysis of rail head characteristics
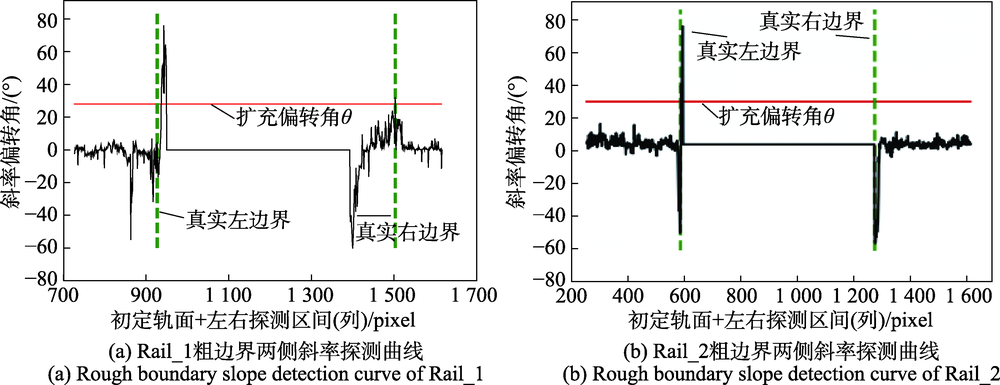
Fig.8 Slope detection analysis on both sides of rough boundary
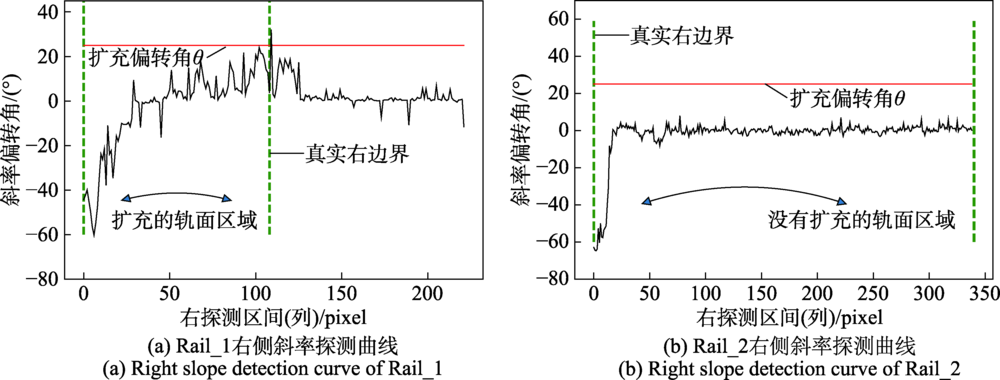
Fig.9 Slope analysis on right side of rough boundary
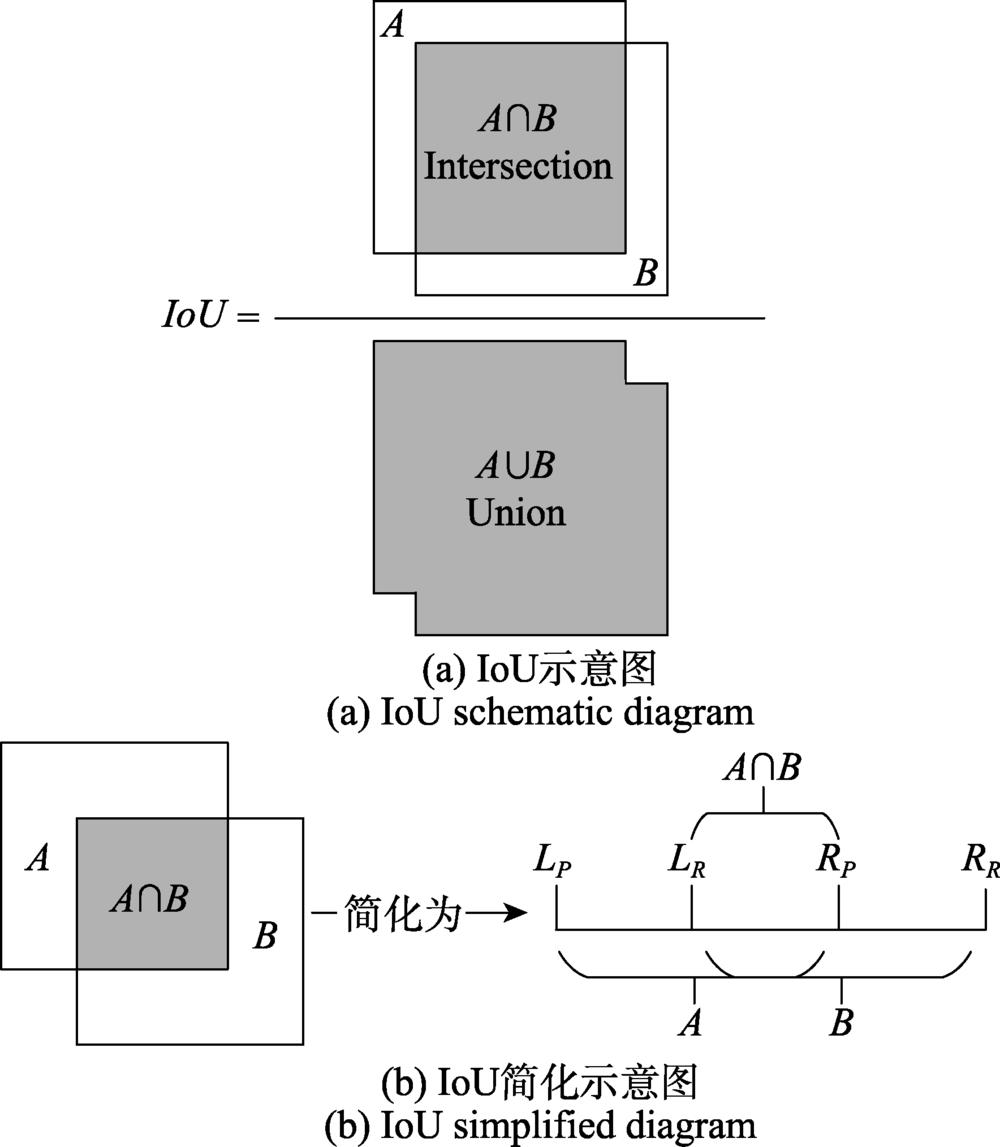
Fig.10 IoU schematic and simplified drawings
Fig.11 IoU schematic and simplified drawings
| Image type | IoUs | Accuracy/% | Time/ms |
|---|---|---|---|
| RCRH无干扰 | 0.934 7 | 100.00 | 24.17 |
| RCRH有干扰 | 0.922 7 | 95.00 | 26.84 |
| 总体 | 0.926 9 | 96.67 | 25.95 |
Table 1 Algorithm extraction results analysis
| Image type | IoUs | Accuracy/% | Time/ms |
|---|---|---|---|
| RCRH无干扰 | 0.934 7 | 100.00 | 24.17 |
| RCRH有干扰 | 0.922 7 | 95.00 | 26.84 |
| 总体 | 0.926 9 | 96.67 | 25.95 |
| 算法 | Rail_1, 真实边界:[922, 1 504] | Rail_2, 真实边界:[596, 1 282] | ||||||
|---|---|---|---|---|---|---|---|---|
| 预测边界 | IoUs | 有效性 | 耗时/ms | 预测边界 | IoUs | 有效性 | 耗时/ms | |
| HP[ | [455, 2 128] | 0.347 9 | No | 47.2 | [588, 1 800] | 0.561 8 | No | 52.6 |
| VP[ | [1, 311] | 0.000 0 | No | 22.8 | [1, 200] | 0.000 0 | No | 18.5 |
| TEBP[ | [878, 1 460] | 0.859 4 | Yes | 14.2 | [580, 1 266] | 0.954 4 | Yes | 12.8 |
| HPCG[ | [878, 1 460] | 0.859 4 | Yes | 18.9 | [580, 1 266] | 0.954 4 | Yes | 16.3 |
| CHMM[ | [878, 1 460] | 0.859 4 | Yes | 16.3 | [580, 1 266] | 0.954 4 | Yes | 13.2 |
| EHLS[ | [948, 1 415] | 0.802 4 | Yes | 37.5 | [606, 1 197] | 0.859 0 | Yes | 38.4 |
| EHSV[ | [917, 1 455] | 0.908 0 | Yes | 28.1 | [596, 1 825] | 0.557 2 | No | 29.3 |
| Proposed method | [942, 1 503] | 0.963 9 | Yes | 21.4 | [599, 1 282] | 0.992 7 | Yes | 22.9 |
Table 2 Performance comparison of different rail surface extraction algorithms
| 算法 | Rail_1, 真实边界:[922, 1 504] | Rail_2, 真实边界:[596, 1 282] | ||||||
|---|---|---|---|---|---|---|---|---|
| 预测边界 | IoUs | 有效性 | 耗时/ms | 预测边界 | IoUs | 有效性 | 耗时/ms | |
| HP[ | [455, 2 128] | 0.347 9 | No | 47.2 | [588, 1 800] | 0.561 8 | No | 52.6 |
| VP[ | [1, 311] | 0.000 0 | No | 22.8 | [1, 200] | 0.000 0 | No | 18.5 |
| TEBP[ | [878, 1 460] | 0.859 4 | Yes | 14.2 | [580, 1 266] | 0.954 4 | Yes | 12.8 |
| HPCG[ | [878, 1 460] | 0.859 4 | Yes | 18.9 | [580, 1 266] | 0.954 4 | Yes | 16.3 |
| CHMM[ | [878, 1 460] | 0.859 4 | Yes | 16.3 | [580, 1 266] | 0.954 4 | Yes | 13.2 |
| EHLS[ | [948, 1 415] | 0.802 4 | Yes | 37.5 | [606, 1 197] | 0.859 0 | Yes | 38.4 |
| EHSV[ | [917, 1 455] | 0.908 0 | Yes | 28.1 | [596, 1 825] | 0.557 2 | No | 29.3 |
| Proposed method | [942, 1 503] | 0.963 9 | Yes | 21.4 | [599, 1 282] | 0.992 7 | Yes | 22.9 |

Fig.12 Comparison results of various rail surface extraction algorithms
| [1] | 张辉, 宋雅男, 王耀南, 等. 钢轨缺陷无损检测与评估技术综述[J]. 仪器仪表学报, 2019, 40(2):11-25. |
| ZHANG H, SONG Y N, WANG Y N, et al. Review of rail defect non-destructive testing and evaluation[J]. Chinese Journal of Scientific Instrument, 2019, 40(2):11-25. | |
| [2] | LI Q Y, ZHONG Z D, LIANG Z P, et al. Rail inspection meets big data: methods and trends[C]// Proceedings of the 18th International Conference on Network-Based Information Systems, Taiwan, China, Sep 2-4, 2015. Washington: IEEE Computer Society, 2015: 302-308. |
| [3] |
ZHANG H, JIN X T, JONATHAN Q M, et al. Automatic visual detection system of railway surface defects with curvature filter and improved Gaussian mixture model[J]. IEEE Transactions on Instrumentation and Measurement, 2018, 67(7):1593-1608.
DOI URL |
| [4] | 金侠挺, 王耀南, 张辉, 等. 基于贝叶斯CNN和注意力网络的钢轨表面缺陷检测系统[J]. 自动化学报, 2019, 45(12):2312-2327. |
| JIN X T, WANG Y N, ZHANG H, et al. DeepRail: automatic visual detection system for railway surface defect using Bayesian CNN and attention network[J]. Acta Automatica Sinica, 2019, 45(12):2312-2327. | |
| [5] | YU H M, LI Q Y, TAN Y Q, et al. A coarse-to-fine model for rail surface defect detection[J]. IEEE Transactions on Instrumentation & Measurement, 2019, 68(3):656-666. |
| [6] | 唐湘娜, 王耀南. 铁轨表面缺陷的视觉检测与识别算法[J]. 计算机工程, 2013, 39(3):25-30. |
| TANG X N, WANG Y N. Visual inspection and classification algorithm of rail surface defect[J]. Computer Engineering, 2013, 39(3):25-30. | |
| [7] | 王耀南, 尹逊帅, 贺振东, 等. 钢轨表面图像冗余信息的模糊匹配算法[J]. 湖南大学学报(自然科学版), 2016, 43(4):75-80. |
| WANG Y N, YIN X S, HE Z D, et al. Algorithm of fuzzy matching for redundancies of rail surface images[J]. Journal of Hunan University (Natural Sciences), 2016, 43(4):75-80. | |
| [8] | LI Q Y, REN S W. A real-time visual inspection system for discrete surface defects of rail heads[J]. IEEE Transactions on Instrumentation & Measurement, 2012, 61(8):2189-2199. |
| [9] | WU Y P, LI Q Y, JIA L M. Research on rail surface defect detection method based on UAV images[C]// Proceedings of the 2018 Prognostics and System Health Management Con-ference, Chongqing, Oct 26-28, 2018. Piscataway: IEEE, 2018: 553-558. |
| [10] | 周咏. 基于图像处理的钢轨表面缺陷识别研究[D]. 兰州: 兰州交通大学, 2018. |
| ZHOU Y. Research on the defect recognition for rail surface based on image processing[D]. Lanzhou: Lanzhou Jiaotong University, 2018. | |
| [11] | 贺振东, 王耀南, 刘洁, 等. 基于背景差分的高铁钢轨表面缺陷图像分割[J]. 仪器仪表学报, 2016, 37(3):640-649. |
| HE Z D, WANG Y N, LIU J, et al. Background differencing-based high-speed rail surface defect image segmentation[J]. Chinese Journal of Scientific Instrument, 2016, 37(3):640-649. | |
| [12] | MIN Y Z, XIAO B Y, DANG J W, et al. Real time detection system for rail surface defects based on machine vision[J]. EURASIP Journal on Image and Video Processing, 2018, 1:3. |
| [13] | 顾桂梅, 李晓梅, 常海涛, 等. 基于HSV空间的钢轨表面区域快速提取算法[J]. 云南大学学报(自然科学版), 2019, 41(4):707-717. |
| GU G M, LI X M, CHANG H T, et al. Fast extraction agori-thm for rail surface region based on HSV space[J]. Journal of Yunnan University (Natural Sciences Edition), 2019, 41(4):707-717. | |
| [14] |
PREMA C E, VINSLEY S S, SURESH S. Multi feature analysis of smoke in YUV color space for early forest fire detection[J]. Fire Technology, 2016, 52(5):1319-1342.
DOI URL |
| [15] |
LIU J H, ZHONG X. An object tracking method based on mean shift algorithm with HSV color space and texture features[J]. Cluster Computing, 2019, 22(3):6079-6090.
DOI URL |
| [16] |
SUN Y H, MU Y, QIN F, et al. Deer body adaptive threshold segmentation algorithm based on color space[J]. Computers, Materials and Continua, 2020, 64(2):1317-1328.
DOI URL |
| [17] |
YANG Y G, ZOU L, ZHOU Y H, et al. Visually meaningful encryption for color images by using Qi hyper-chaotic system and singular value decomposition in YCbCr color space[J]. International Journal for Light and Electron Optics, 2020, 213:164422.
DOI URL |
| [18] | WEI X J, YE P X. Efficiency of orthogonal super greedy algorithm under the restricted isometry property[J]. Journal of Inequalities and Applications, 2019(1):124. |
| [19] | 郅惠博, 李洪涛, 张含露. 国内外铁路用钢轨标准对比分析研究[J]. 科技视界, 2019, 32:1-6. |
| ZHI H B, LI H T, ZHANG H L. Comparative analysis and research on railway rail standards at home and abroad[J]. Science & Technology Vision, 2019, 32:1-6. | |
| [20] | GIRSHICK R B. Fast R-CNN[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision, Santiago, Dec 7-13, 2015. Washington: IEEE Computer Society, 2015: 1440-1448. |
| [1] | ZHANG Zichen, YUE Kun, QI Zhiwei, DUAN Liang. Incremental Construction of Time-Series Knowledge Graph [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(3): 598-607. |
| [2] | PANG Yuan, WU Jigang, CHEN Long, YAO Mianyang. Energy Balancing for Multiple Devices with Multiple Tasks in Mobile Edge Computing [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(2): 480-488. |
| [3] | SUN Huanliang, FU Shanshan, LIU Junling, YU Ge, XU Hongfei. Team Formation with Weak Ties in Social Networks [J]. Journal of Frontiers of Computer Science and Technology, 2016, 10(6): 773-785. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
/D:/magtech/JO/Jwk3_kxyts/WEB-INF/classes/