
Journal of Frontiers of Computer Science and Technology ›› 2022, Vol. 16 ›› Issue (8): 1706-1726.DOI: 10.3778/j.issn.1673-9418.2201057
• Surveys and Frontiers • Previous Articles Next Articles
ZHAO Yue, SHEN Bo( ), WU Wenliang, ZHOU Xingshe
), WU Wenliang, ZHOU Xingshe
Received:2022-01-18
Revised:2022-04-01
Online:2022-08-01
Published:2022-08-19
About author:ZHAO Yue, born in 1986, Ph.D. candidate. Her research interest is the evaluation of swarm intelligence.Supported by:
赵月, 沈博(), 武文亮, 周兴社
通讯作者:
+E-mail: shen@nwpu.edu.cn.作者简介:赵月(1986—),女,博士研究生,主要研究方向为群体智能评价。基金资助:CLC Number:
ZHAO Yue, SHEN Bo, WU Wenliang, ZHOU Xingshe. Survey on Modeling Method of Spatial Cooperative Behavior of Swarm Robots[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(8): 1706-1726.
赵月, 沈博, 武文亮, 周兴社. 集群机器人空间协作行为模型构建方法综述[J]. 计算机科学与探索, 2022, 16(8): 1706-1726.
Add to citation manager EndNote|Ris|BibTeX
URL: http://fcst.ceaj.org/EN/10.3778/j.issn.1673-9418.2201057
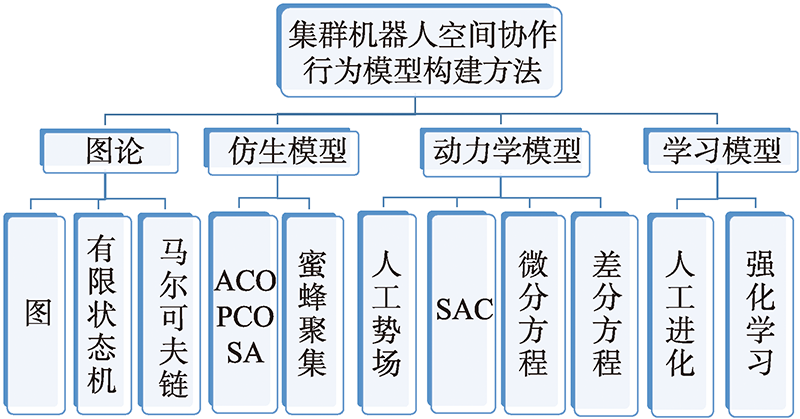
Fig.1 Modeling method of spatial cooperative behavior of swarm robots

Fig.2 3D map and a part of corresponding grid map
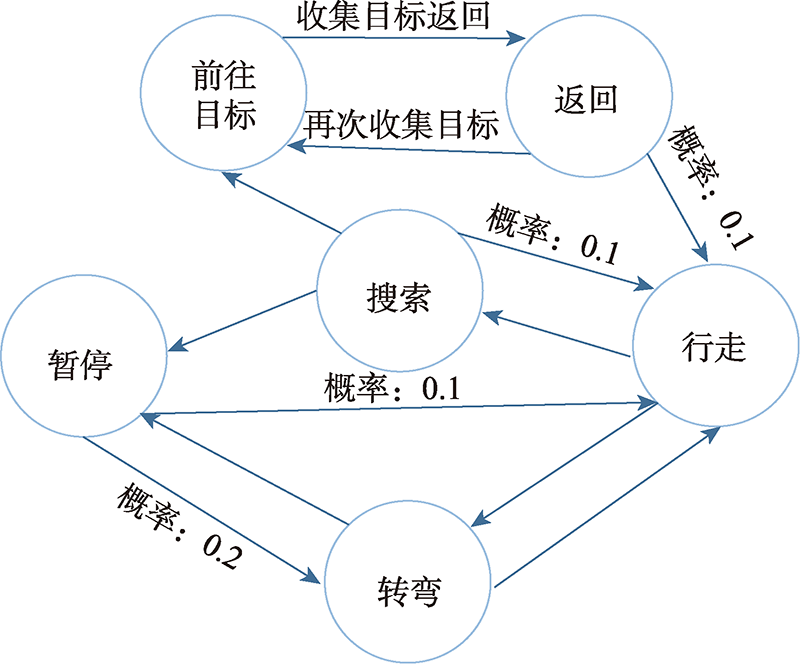
Fig.3 Finite state machine in swarm robot search
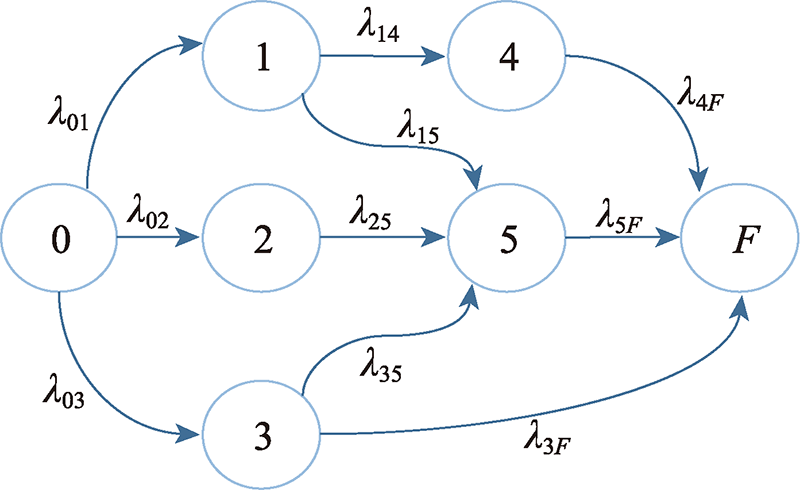
Fig.4 UAVs path planning based on Markov chain
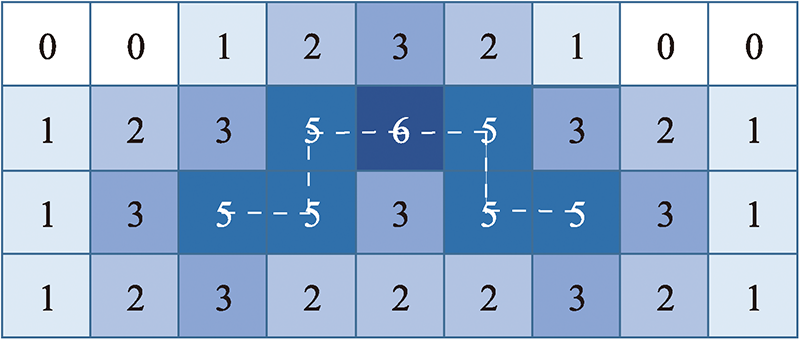
Fig.5 Path planning based on ACO
| 模型 | 模型优点 | 适用场景 |
|---|---|---|
| ACO | 正反馈机制,搜索分布式,易于寻找到全局最优解 | 收敛速度慢,不恰当的初始参数会减弱算法的寻优能力 |
| PCO | 优化速度快,简单易实现 | 易早熟收敛,局部寻优能力差,对于离散的优化问题处理不佳 |
| SA | 局部搜索能力强,计算过程简单,可用于求解复杂的非线性优化问题 | 全局搜索能力差,容易受到参数的影响,收敛速度慢,执行时间长 |
Table 1 Comparison of ACO, PSO and SA modeling methods
| 模型 | 模型优点 | 适用场景 |
|---|---|---|
| ACO | 正反馈机制,搜索分布式,易于寻找到全局最优解 | 收敛速度慢,不恰当的初始参数会减弱算法的寻优能力 |
| PCO | 优化速度快,简单易实现 | 易早熟收敛,局部寻优能力差,对于离散的优化问题处理不佳 |
| SA | 局部搜索能力强,计算过程简单,可用于求解复杂的非线性优化问题 | 全局搜索能力差,容易受到参数的影响,收敛速度慢,执行时间长 |
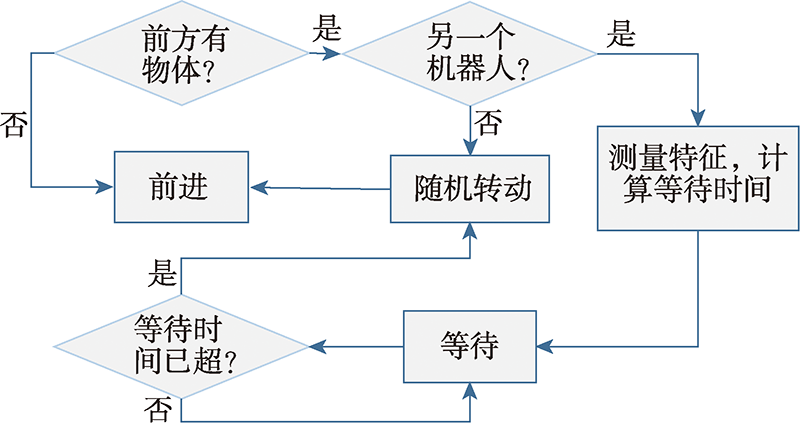
Fig.6 BEECLUST model
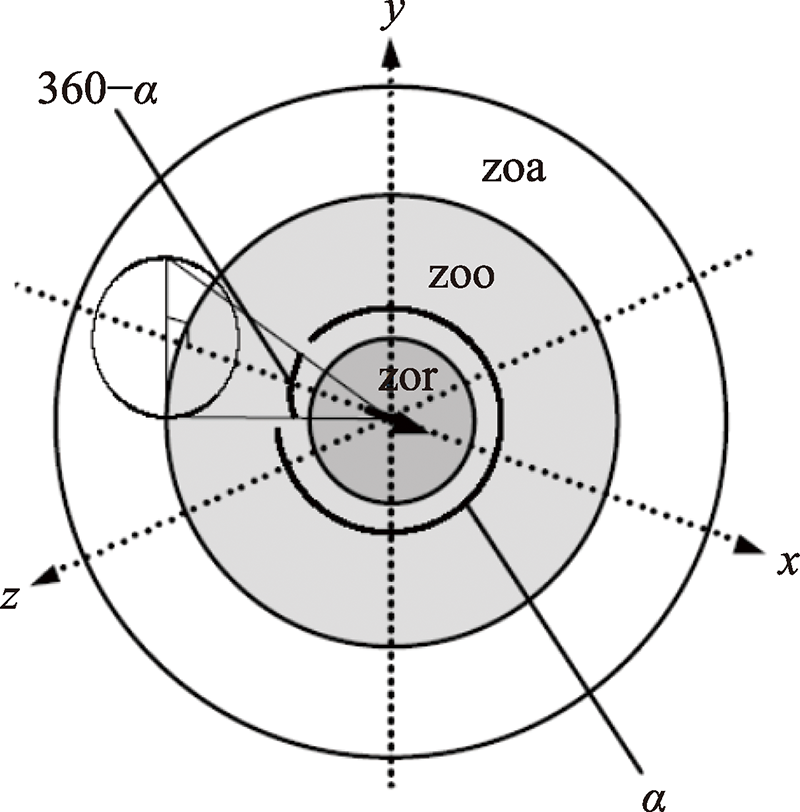
Fig.7 Couzin model
| 模型 | 建模维度 | 模型粒度 | 模型特点 |
|---|---|---|---|
| Vicsek | 二维 | 局部 | 简单、有效、自驱动 |
| C-S | 二维 | 全局 | 基于Vicsek,算法扩展丰富 |
| Couzin | 二维 | 全局 | 规则和算法简单 |
Table 2 SCA model comparison
| 模型 | 建模维度 | 模型粒度 | 模型特点 |
|---|---|---|---|
| Vicsek | 二维 | 局部 | 简单、有效、自驱动 |
| C-S | 二维 | 全局 | 基于Vicsek,算法扩展丰富 |
| Couzin | 二维 | 全局 | 规则和算法简单 |
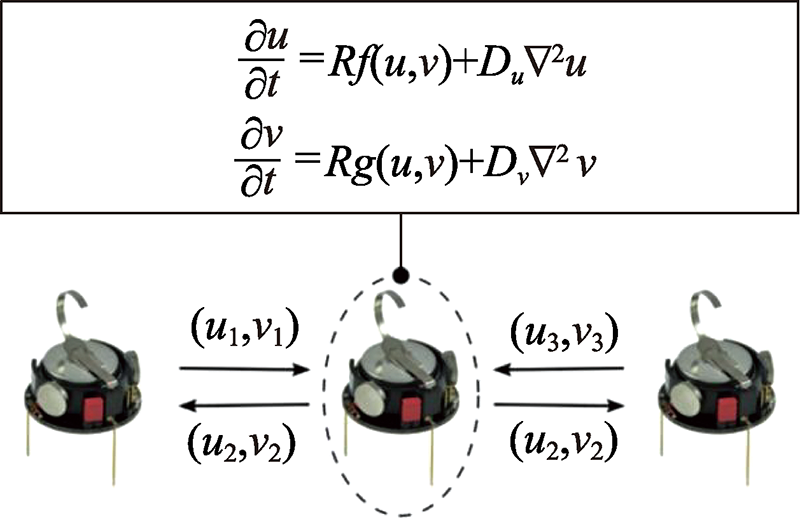
Fig.8 Reaction diffusion model of swarm robots
| 方程 | 模型粒度 | 模型特点 |
|---|---|---|
| 速率方程 | 全局 | 可描述平均量,以数学的角度,以统计方法表述宏观行为 |
| 扩散方程 | 全局 | 由于方程的非线性项,可使集群形成丰富的图案 |
| Langevin和Fokker- Planck方程 | 全局 | 可对空间进行建模 |
Table 3 Comparison of differential equations
| 方程 | 模型粒度 | 模型特点 |
|---|---|---|
| 速率方程 | 全局 | 可描述平均量,以数学的角度,以统计方法表述宏观行为 |
| 扩散方程 | 全局 | 由于方程的非线性项,可使集群形成丰富的图案 |
| Langevin和Fokker- Planck方程 | 全局 | 可对空间进行建模 |
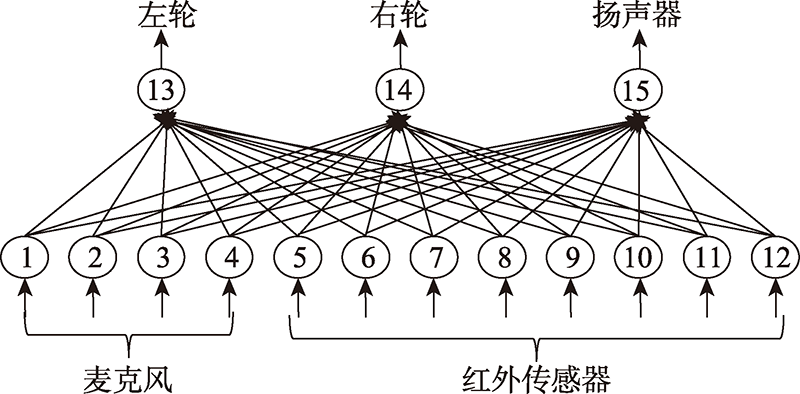
Fig.9 Neural network in artificial evolution
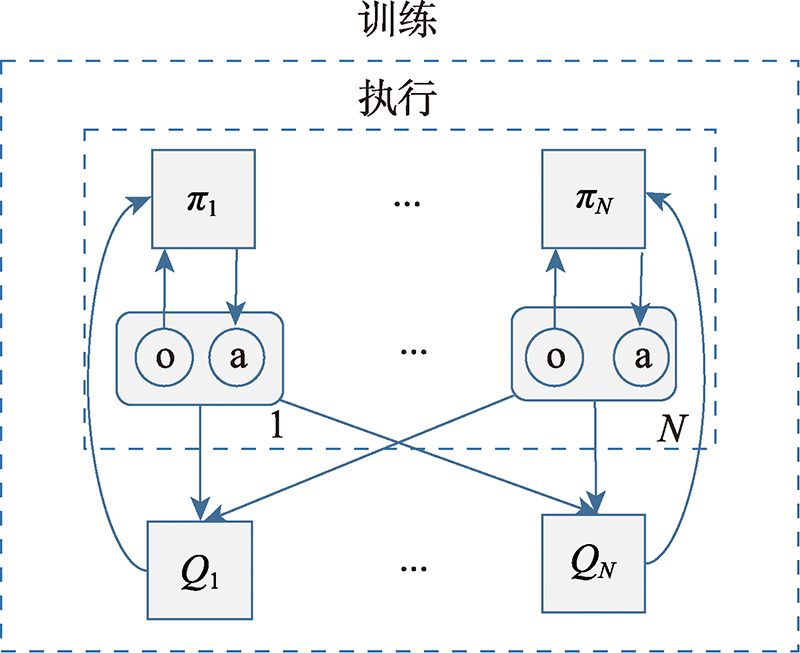
Fig.10 Centralized training and decentralized execution of MADDPG
| 建模方法 | 模型粒度 | 适用场景 | 模型特点 | 建模难度 | |
|---|---|---|---|---|---|
| 图论 | 图 | 宏观 | 编队、围捕、避障、导航、覆盖等 | 已开发出众多完善算法,可用已有算法对集群机器人建模 | 中 |
| 有限状态机 | 宏观/微观 | 聚集、搜索、编队等 | 简单易用,状态间的关系直观明了,适用于规模小的集群 | 低 | |
| 马尔可夫链 | 宏观 | 聚集、覆盖、避障等 | 可为不确定性提供理论支撑,需要了解集群状态变化的各种概率 | 中 | |
| 仿生模型 | ACO、PCO、SA | 宏观 | 导航、编队、集群运动等 | 建立符合实际问题的仿生规则难度较高,但是解决问题较一般的搜索方法更高效 | 高 |
| 蜜蜂聚集 | 宏观 | 聚集 | 无位置通信内存要求,可用于异构集群 | 低 | |
| 动力学模型 | 人工势场 | 宏观 | 覆盖、分散、编队等 | 在聚集上有良好的稳定性,实时性强 | 中 |
| SCA模型 | 微观 | 群集、编队等 | 基于定义的模型自驱动,简单有效 | 低 | |
| 微分方程 | 宏观 | 导航、编队、围捕、集群运动等 | 理论上可对任何行为进行建模,但是求解难度高 | 高 | |
| 学习模型 | 人工进化 | 宏观/微观 | 编队、分散、导航等 | 对环境的适应性高,但是无法保证可扩展性 | 中 |
| 强化学习 | 宏观/微观 | 群集、导航、编队等 | 适用于有全局目标、环境复杂、智能水平要求高的场景 | 高 | |
Table 4 Comparison of modeling methods
| 建模方法 | 模型粒度 | 适用场景 | 模型特点 | 建模难度 | |
|---|---|---|---|---|---|
| 图论 | 图 | 宏观 | 编队、围捕、避障、导航、覆盖等 | 已开发出众多完善算法,可用已有算法对集群机器人建模 | 中 |
| 有限状态机 | 宏观/微观 | 聚集、搜索、编队等 | 简单易用,状态间的关系直观明了,适用于规模小的集群 | 低 | |
| 马尔可夫链 | 宏观 | 聚集、覆盖、避障等 | 可为不确定性提供理论支撑,需要了解集群状态变化的各种概率 | 中 | |
| 仿生模型 | ACO、PCO、SA | 宏观 | 导航、编队、集群运动等 | 建立符合实际问题的仿生规则难度较高,但是解决问题较一般的搜索方法更高效 | 高 |
| 蜜蜂聚集 | 宏观 | 聚集 | 无位置通信内存要求,可用于异构集群 | 低 | |
| 动力学模型 | 人工势场 | 宏观 | 覆盖、分散、编队等 | 在聚集上有良好的稳定性,实时性强 | 中 |
| SCA模型 | 微观 | 群集、编队等 | 基于定义的模型自驱动,简单有效 | 低 | |
| 微分方程 | 宏观 | 导航、编队、围捕、集群运动等 | 理论上可对任何行为进行建模,但是求解难度高 | 高 | |
| 学习模型 | 人工进化 | 宏观/微观 | 编队、分散、导航等 | 对环境的适应性高,但是无法保证可扩展性 | 中 |
| 强化学习 | 宏观/微观 | 群集、导航、编队等 | 适用于有全局目标、环境复杂、智能水平要求高的场景 | 高 | |
| [1] | BAYINDIR L. A review of swarm robotics tasks[J]. Neurocomputing, 2016, 172(8): 292-321. |
| [2] | SHLYAKHOV N E, VATAMANIUK I V, RONZHIN A L. Survey of methods and algorithms of robot swarm aggregation[J]. Journal of Physics: Conference Series, 2017, 803: 012146. |
| [3] | 赵成伟. 基于单链式导航的集群机器人序列任务规划算法研究[D]. 开封: 河南大学, 2019. |
| ZHAO C W. Research on sequential task planning algorithm for swarm robots based on single chain navigation[D]. Kaifeng: Henan University, 2019. | |
| [4] | 陈继清, 谭成志, 莫荣现, 等. 基于人工势场的 A* 算法的移动机器人路径规划[J]. 计算机科学, 2021, 48(11): 327-333. |
| CHEN J Q, TAN C Z, MO R X, et al. Path planning of mobile robot with A* algorithm based on artificial potential field[J]. Computer Science, 2021, 48(11): 327-333. | |
| [5] | WANG X Z. The comparison of three algorithms in shortest path issue[J]. Journal of Physics: Conference Series, 2018, 1087: 022011. |
| [6] | 赖云晖, 李瑞, 史莹晶, 等. 基于图论法的四旋翼三角形结构编队控制[J]. 控制理论与应用, 2018, 35(10): 1530-1537. |
| LAI Y H, LI R, SHI Y J, et al. On the study of a multi-quadrotor formation control with triangular structure based on graph theory[J]. Control Theory and Application, 2018, 35(10): 1530-1537. | |
| [7] | COPPOLA M, GUO J, GILL E, et al. Provable self-organizing pattern formation by a swarm of robots with limited knowledge[J]. Swarm Intelligence, 2019, 13(1): 59-94. |
| [8] | VAUGHAN N. Evolutionary robot swarm cooperative retrieval[C]// LNCS 10928: Proceedings of the 7th International Conference on Biomimetic and Biohybrid Systems, Paris, Jul 17-20, 2018. Cham: Springer, 2018: 517-521. |
| [9] | MILETITCH R, DORIGO M, TRIANNI V. Balancing exploitation of renewable resources by a robot swarm[J]. Swarm Intelligence, 2018, 12(4): 307-326. |
| [10] | LI J, TAN Y. A probabilistic finite state machine based strategy for multi-target search using swarm robotics[J]. Applied Soft Computing, 2019, 77: 467-483. |
| [11] | 贾庆勇. 对抗环境下多水下机器人协同围捕方法研究[D]. 合肥: 中国科学院大学, 2019. |
| JIA Q Y. Research on cooperative encirclement method of multiple underwater robots in countermeasure environment[D]. Hefei: University of Chinese Academy of Sciences, 2019. | |
| [12] | 胡美富, 宁芊, 陈炳才, 等. RWPSO与马尔科夫链的无人机航路规划[J]. 哈尔滨工业大学学报, 2019, 51(11): 75-81. |
| HU M F, NING Q, CHEN B C, et al. UAV route planning based on RWPSO and Markov chain[J]. Journal of Harbin Institute of Technology, 2019, 51(11): 75-81. | |
| [13] | SHIRSAT A, ELAMVAZHUTHI K, BERMAN S. Multi-robot target search using probabilistic consensus on discrete Markov chains[C]// Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics, Abu Dhabi, Nov 4-6, 2020. Piscataway: IEEE, 2020: 108-115. |
| [14] | 张文旭, 马磊, 贺荟霖, 等. 强化学习的地-空异构多智能体协作覆盖研究[J]. 智能系统学报, 2018, 13(2): 202-207. |
| ZHANG W X, MA L, HE H L, et al. Air-ground heterogeneous coordination for multi-agent coverage based on reinforced learning[J]. CAAI Transactions on Intelligent Systems, 2018, 13(2): 202-207. | |
| [15] | MASKE H, KIESON E, CHOWDHARY G, et al. Learning task-based instructional policy for excavator-like robots[C]// Proceedings of the 2018 IEEE International Conference on Robotics and Automation, Brisbane, May 21-25, 2018. Piscataway: IEEE, 2018: 1962-1969. |
| [16] | DORIGO M, MANIEZZO V, COLORNI A. Ant system: optimization by a colony of cooperating agents[J]. IEEE Transactions on Systems, Man, and Cybernetics: Part B Cybernetics, 1996, 26(1): 29-41. |
| [17] | CHENG J, WANG B. Flocking control of mobile robots with obstacle avoidance based on simulated annealing algorithm[J]. Mathematical Problems in Engineering, 2020. DOI: 10.1155/2020/7357464. |
| [18] | CHEN G L, LIU J. Mobile robot path planning using ant colony algorithm and improved potential field method[J]. Computational Intelligence and Neuroscience, 2019. DOI: 10.1155/2019/1932812. |
| [19] | SALIMI N, RAFE V, TABRIZCHI H, et al. Fuzzy genetic algorithm approach for verification of reachability and detection of deadlock in graph transformation systems[C]// Proceedings of the 2020 IEEE 3rd International Conference and Workshop in Óbuda on Electrical and Power Engineering, Budapest, 2020. Washington:IEEE Computer Society, 2020: 241-250. |
| [20] | DAI X L, LONG S, ZHANG Z W, et al. Mobile robot path planning based on ant colony algorithm with A* heuristic method[J]. Frontiers in Neurorobotics, 2019, 13: 15. |
| [21] | DE ALMEIDA J P L S, NAKASHIMA R T, NEVES-JR F, et al. Bio-inspired on-line path planner for cooperative exploration of unknown environment by a multi-robot system[J]. Robotics and Autonomous Systems, 2019, 112: 32-48. |
| [22] | WU Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission[J]. Ocean Engineering, 2019, 182: 162-173. |
| [23] | KRELL E, SHETA A, BALASUBRAMANIAN A P R, et al. Collision-free autonomous robot navigation in unknown environments utilizing PSO for path planning[J]. Journal of Artificial Intelligence and Soft Computing Research, 2019, 9(4): 267-282. |
| [24] | WANG L J, GUO J, WANG Q, et al. Ground robot path planning based on simulated annealing genetic algorithm[C]// Proceedings of the 2018 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, Zhengzhou, Oct 18-20, 2018. Piscataway: IEEE, 2018: 417-424. |
| [25] | BASBOUS B. 2D UAV path planning with radar threatening areas using simulated annealing algorithm for event detection[C]// Proceedings of the 2018 International Conference on Artificial Intelligence and Data Processing, Malatya, Sep 28-30, 2018. Piscataway: IEEE, 2018: 1-7. |
| [26] | 邓力恺. 无人机集群智能规划系统研究[D]. 成都: 电子科技大学, 2020. |
| DENG L K. Research on intelligent planning system of UAVs[D]. Chengdu: University of Electronic Science and Technology of China, 2020. | |
| [27] | GUL F, RAHIMAN W, SYED HASSAN S S N A, et al. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO-GWO optimization algorithm with evolutionary programming[J]. Journal of Ambient Intelligence and Humanized Computing, 2021, 12(7): 7873-7890. |
| [28] | LIU X Z, HAN Y, CHEN J, et al. Discrete pigeon inspired simulated annealing algorithm and contract net algorithm based on multi-objective optimization for task allocation of UAV formation[C]// Proceedings of the 12th International Joint Conference on Computational Intelligence, Budapest, Nov 2-4, 2020: 176-183. |
| [29] | WAHBY M, WEINHOLD A, HAMANN H. Revisiting BEECLUST: aggregation of swarm robots with adaptiveness to different light settings[J]. EAI Endorsed Transactions on Collaborative Computing, 2016, 2(9): e1. |
| [30] | KENGYEL D, ZAHADAT P, WOTAWA F, et al. Towards swarm level optimisation: the role of different movement patterns in swarm systems[J]. International Journal of Parallel, Emergent and Distributed Systems, 2019, 34(3): 241-259. |
| [31] | KENGYEL D, THENIUS R, CRAILSHEIM K, et al. Influence of a social gradient on a swarm of agents controlled by the BEECLUST algorithm[C]//Proceedings of the 12th European Conference on the Synthesis and Simulation of Living Systems:Advances in Artificial Life, Sicily, Sep 2-6, 2013: 1041-1048. |
| [32] | European Commission, CORDIS. Underwater robot swarms use collective cognition to perform tasks[EB/OL]. ( 2015-05-27) [2021-12-27]. https://digital-strategy.ec.europa.eu/en/news/cocoro-robot-swarms-use-collective-cognition-perform-tasks. |
| [33] | AMJADI A S, RAOUFI M, TURGUT A E, et al. Cooperative pollution source localization and cleanup with a bio-inspired swarm robot aggregation[J]. arXiv:1907.09585, 2019. |
| [34] | ROEN H H, VARANKIAN V V, NICHELE S, et al. Gathering of the Hive: investigating the clustering behaviour of honeybees through art and swarm robotics[C]// Proceedings of the 2019 Conference on Artificial Life, Newcastle, 2019. Cambridge:MIT Press, 2019: 505-506. |
| [35] | HE S T, BASTANI F, BALASINGAM A, et al. BeeCluster: drone orchestration via predictive optimization[C]// Proceedings of the 18th Annual International Conference on Mobile Systems, Applications, and Services, Toronto, Jun 15-19, 2020. New York: ACM, 2020: 299-311. |
| [36] | SHAH D, VACHHANI L. Swarm aggregation without communication and global positioning[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 886-893. |
| [37] | NOVISCHI D M, FLOREA A M. Decentralized swarm aggregation and dispersion with inter-member collision avoidance for non-holonomic multi-robot systems[C]// Proceedings of the 14th IEEE International Conference on Intelligent Computer Communication and Processing, Cluj-Napoca, Sep 6-8, 2018. Piscataway: IEEE, 2018: 89-95. |
| [38] | ZHANG J, YAN J, ZHANG P. Fixed-wing UAV formation control design with collision avoidance based on an improved artificial potential field[J]. IEEE Access, 2018, 6: 78342-78351. |
| [39] | ZHANG T J. Unmanned aerial vehicle formation inspired by bird flocking and foraging behavior[J]. International Journal of Automation and Computing, 2018, 15(4): 402-416. |
| [40] | 程旗, 岳碧波. 无人机自主编队的人工力场控制方法[J]. 兵器装备工程学报, 2018, 39(8): 88-91. |
| CHENG Q, YUE B B. Artificial potential fields control method of UAV autonomous formation[J]. Journal of Ordnance Equipment Engineering, 2018, 39(8): 88-91. | |
| [41] | SUN X M, GE S S, XU Q. Neural network based adaptive region tracking control for a swarm of ships in constrained space[C]// Proceedings of the 2018 10th International Conference on Advanced Computational Intelligence, Xiamen, Mar 29-31, 2018. Piscataway: IEEE, 2018: 364-369. |
| [42] | 黄东晋, 段思文, 雷雪, 等. 基于Voronoi图的群体队形控制方法[J]. 计算机应用, 2019, 39(6): 1799-1803. |
| HUANG D J, DUAN S W, LEI X, et al. Group formation control method based on Voronoi diagram[J]. Journal of Computer Applications, 2019, 39(6): 1799-1803. | |
| [43] | FEDELE G, D'ALFONSO L. A model for swarm formation with reference tracking[C]// Proceedings of the 56th IEEE Annual Conference on Decision and Control, Melbourne, Dec 12-15, 2017. Piscataway: IEEE, 2017: 381-386. |
| [44] | FEDELE G, D'ALFONSO L. A kinematic model for swarm finite-time trajectory tracking[J]. IEEE Transactions on Cybernetics, 2018, 49(10): 3806-3815. |
| [45] | RAOUFI M, TURGUT A E, ARVIN F. Self-organized collective motion with a simulated real robot swarm[C]// LNCS 11649: Proceedings of the 20th Annual Conference on Towards Autonomous Robotic Systems, London, Jul 3-5, 2019. Cham: Springer, 2019: 263-274. |
| [46] | LYU H, YIN Y. Ship’s trajectory planning for collision avoidance at sea based on modified artificial potential field[C]// Proceedings of the 2nd International Conference on Robotics and Automation Engineering, Shanghai, Dec 29-31, 2017. Piscataway: IEEE, 2017: 351-357. |
| [47] | REYNOLDS C W. Flocks, herds and schools: a distributed behavioral model[C]// Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, Jul 27-31, 1987. New York: ACM, 1987: 25-34. |
| [48] | VICSEK T, CZIRÓK A, BEN-JACOB E, et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75(6): 1226-1229. |
| [49] | CUCKER F, SMALE S. Emergent behavior in flocks[J]. IEEE Transactions on Automatic Control, 2007, 52(5): 852-862. |
| [50] | COUZIN I D, KRAUSE J, JAMES R, et al. Collective memory and spatial sorting in animal groups[J]. Journal of Theoretical Biology, 2002, 218(1): 1-11. |
| [51] | 韩莉淼, 杨中元, 耿显亚. 基于数学建模的集群运动模拟仿真研究[J]. 数学学习与研究, 2019(6): 14-15. |
| HAN L M, YANG Z Y, GENG X Y. Simulation of collective motion based on mathematical modeling[J]. Mathematical Learning and Research, 2019(6): 14-15. | |
| [52] | 李丹. 一类变速率多主体系统的同步问题研究[D]. 合肥: 中国科学院大学, 2015. |
| LI D. Research on synchronization of a class of variable rate multi-agent systems[D]. Hefei: University of Chinese Academy of Sciences, 2015. | |
| [53] | ZHANG X, JIA S, LI X. Improving the synchronization speed of self-propelled particles with restricted vision via randomly changing the line of sight[J]. Nonlinear Dynamics, 2017, 90(1): 43-51. |
| [54] | 李玉剑, 田宝美, 杨维维, 等. 视角在趋同集群运动中的影响[C]// 中国空天安全会议:空天资源的可持续发展, 烟台, 2015. 北京:科学出版社, 2015: 252-255. |
| LI Y J, TIAN B M, YANG W W, et al. The influence of perspective on convergence collective movement[C]// China Aerospace Safety Conference: Sustainable Development of Aerospace Resources, Yantai, 2015. Beijing: Science Press, 2015: 252-255. | |
| [55] | WANG T, PENG X G, WU Y P, et al. A GP based two-layer framework for data-driven modeling of swarm self-organizing rules[C]// Proceedings of the 2019 IEEE Congress on Evolutionary Computation, Wellington, Jun 10-13, 2019. Piscataway: IEEE, 2019: 174-181. |
| [56] | VÁSÁRHELYI G, VIRÁGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3(20): 3536. |
| [57] | CHO Y P, LI Z C. Emergent behavior of Cucker-Smale flocking particles with heterogeneous time delays[J]. Applied Mathematics Letters, 2018, 86: 49-56. |
| [58] | GIREJKO E, MACHADO L, MALINOWSKA A B, et al. On consensus in the Cucker-Smale type model on isolated time scales[J]. Discrete & Continuous Dynamical Systems, 2018, 11(1): 77-89. |
| [59] | MA J, LAI M K. Finite-time flocking control of a swarm of Cucker-smale agents with collision avoidance[C]// Proceedings of the 24th International Conference on Mechatronics and Machine Vision in Practice, Auckland, Nov 21-23, 2017. Piscataway: IEEE, 2017: 1-6. |
| [60] | CANALE E, DALMAO F, MORDECKI E, et al. Robustness of Cucker-Smale flocking model[J]. IET Control Theory & Applications, 2015, 9(3): 346-350. |
| [61] | LERMAN K, GALSTYAN A. A general methodology for mathematical analysis of multi-agent systems: ISI-TR-529[R]. Marina del Rey: USC Information Sciences Institute, 2001. |
| [62] | ROY S, ANNUNZIATO M, BORZÌ A, et al. A Fokker-Planck approach to control collective motion[J]. Computational Optimization and Applications, 2018, 69(2): 423-459. |
| [63] | TURING A M. The chemical basis of morphogenesis[J]. Philosophical Transactions of the Royal Society of London, 1952, 237(641): 37-72. |
| [64] | CARRILLO-ZAPATA D, CARRANZA N, DIEGO X, et al. Morphogenesis in robot swarms[J]. Science Robotics, 2018, 3(25): 9178. |
| [65] | SHIRAZI A R, JIN Y C. Regulated morphogen gradients for target surrounding and adaptive shape formation[J]. IEEE Transactions on Cognitive and Developmental Systems, 2021, 13(4): 818-826. |
| [66] | ELAMVAZHUTHI K, KUIPER H, BERMAN S. PDE-based optimization for stochastic mapping and coverage strategies using robotic ensembles[J]. Automatica, 2018, 95: 356-367. |
| [67] | 郭莉菲, 田玉平. 多机器人协同搜索过程中的队形部署[J]. 工业控制计算机, 2014, 27(5): 90-93. |
| GUO L F, TIAN Y P. Formation deployment of multiple robots in cooperative seeking process[J]. Industrial Control Computer, 2014, 27(5): 90-93. | |
| [68] | HAMANN H. Swarm robotics: a formal approach[M]. Berlin, Heidelberg: Springer, 2018. |
| [69] | ELAMVAZHUTHI K, KUIPER H, BERMAN S. Controllability to equilibria of the 1-D Fokker-Planck equation with zero-flux boundary condition[C]// Proceedings of the 56th IEEE Annual Conference on Decision and Control, Melbourne, Dec 12-15, 2017. Piscataway: IEEE, 2017: 2485-2491. |
| [70] | SHIRI H, PARK J, BENNIS M. Massive autonomous UAV path planning: a neural network based mean-field game theoretic approach[C]// Proceedings of the 2019 IEEE Global Communications Conference, Waikoloa, Dec 9-13, 2019. Piscataway: IEEE, 2019: 1-6. |
| [71] | LI J, TAN Y. A two-stage imitation learning framework for the multi-target search problem in swarm robotics[J]. Neurocomputing, 2019, 334: 249-264. |
| [72] | SOYSAL O, BAHÇECI E, ŞAHIN E. Aggregation in swarm robotic systems: evolution and probabilistic control[J]. Turkish Journal of Electrical Engineering & Computer Sciences, 2007, 15(2): 199-225. |
| [73] | TRIANNI V, LOPEZ-IBANEZ M. Advantages of task-specific multi-objective optimisation in evolutionary robotics[J]. PLoS ONE, 2015, 10: e0136406. |
| [74] | KATADA Y. Evolutionary design method of probabilistic finite state machine for swarm robots aggregation[J]. Artificial Life and Robotics, 2018, 23(4): 600-608. |
| [75] | SILVA F, URBANO P, CORREIA L, et al. odNEAT: an algorithm for decentralised online evolution of robotic controllers[J]. Evolutionary Computation, 2015, 23(3): 421-449. |
| [76] | NEUPANE A, GOODRICH M A. Learning swarm behaviors using grammatical evolution and behavior trees[C]// Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, Aug 10-16, 2019: 513-520. |
| [77] | GUPTA J K, EGOROV M, KOCHENDERFER M J. Cooperative multi-agent control using deep reinforcement learning[C]// LNCS 10642: Proceedings of the 2017 International Conference on Autonomous Agents and Multiagent Systems, São Paulo, May 8-12, 2017. Cham: Springer, 2017: 66-83. |
| [78] | LOWE R, WU Y, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments[J]. arXiv:1706.02275, 2017. |
| [79] | FOERSTER J N, FARQUHAR G, AFOURAS T, et al. Counterfactual multi-agent policy gradients[C]// Proceedings of the 32nd AAAI Conference on Artificial Intelligence, the 30th Innovative Applications of Artificial Intelligence, and the 8th AAAI Symposium on Educational Advances in Artificial Intelligence, New Orleans, Feb 2-7, 2018. Menlo Park: AAAI, 2018: 2974-2982. |
| [80] | YU C, VELU A, VINITSKY E, et al. The surprising effectiveness of MAPPO in cooperative, multi-agent games[J]. arXiv:2103.01955, 2021. |
| [81] | ZHU P, DAI W, YAO W, et al. Multi-robot flocking control based on deep reinforcement learning[J]. IEEE Access, 2020, 8: 150397-150406. |
| [82] | KONG W R, ZHUO D Y, YANG Z. Air combat strategies generation of CGF based on MADDPG and reward shaping[C]// Proceedings of the 2020 International Conference on Computer Vision, Image and Deep Learning, Chongqing, Jul 10-12, 2020. Piscataway: IEEE: 651-655. |
| [83] | WU T H, JIANG M Z, ZHANG L. Cooperative multiagent deep deterministic policy gradient (CoMADDPG) for intelligent connected transportation with unsignalized intersection[J]. Mathematical Problems in Engineering, 2020. DOI: 10.1155/2020/1820527. |
| [84] | CHEN W B, HUA L, XU L X, et al. MADDPG algorithm for coordinated welding of multiple robots[C]// Proceedings of the 6th International Conference on Automation, Control and Robotics Engineering, Dalian, Jul 15-17, 2021. Piscataway: IEEE, 2021: 1-5. |
| [85] | JADERBERG M, CZARNECKI W M, DUNNING I, et al. Human-level performance in 3D multiplayer games with population-based reinforcement learning[J]. Science, 2019, 364(6443): 859-865. |
| [86] | AMIN S, ELAHI A, SAGHAR K, et al. Formal modelling and verification approach for improving probabilistic behaviour of robot swarms[C]// Proceedings of the 14th International Bhurban Conference on Applied Sciences and Technology, Islamabad, Jan 10-14, 2017. Piscataway: IEEE, 2017: 392-400. |
| [1] | GUO Yinjing, MENG Qingliang, KONG Fang, LYU Wenhong. Research Status and Prospect of AUV Path Planning Algorithms [J]. Journal of Frontiers of Computer Science and Technology, 2020, 14(12): 1981-1994. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
/D:/magtech/JO/Jwk3_kxyts/WEB-INF/classes/