
Journal of Frontiers of Computer Science and Technology ›› 2022, Vol. 16 ›› Issue (7): 1516-1528.DOI: 10.3778/j.issn.1673-9418.2112006
• Surveys and Frontiers • Previous Articles Next Articles
ZHANG Shuohang, GUO Gaizhi+( )
)
Received:2021-12-01
Revised:2022-01-24
Online:2022-07-01
Published:2022-07-25
Supported by:
张硕航, 郭改枝+()
作者简介:张硕航(1996—),女,内蒙古赤峰人,硕士研究生,主要研究方向为数据处理。 基金资助:CLC Number:
ZHANG Shuohang, GUO Gaizhi. Review of Multiple Traveling Salesman Model and Its Application[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1516-1528.
张硕航, 郭改枝. 多旅行商模型及其应用研究综述[J]. 计算机科学与探索, 2022, 16(7): 1516-1528.
Add to citation manager EndNote|Ris|BibTeX
URL: http://fcst.ceaj.org/EN/10.3778/j.issn.1673-9418.2112006

Fig.1 Development history of TSP scale
| 城市数n | 回路数 | 各回路和 | 搜索时间 |
|---|---|---|---|
| 5 | 12 | 60 | 6.00×10-12 s |
| 10 | 1.81×105 | 1.81×106 | 1.81×10-7 s |
| 40 | 1.02×1046 | 4.08×1047 | 1.32×1027 a |
| 100 | 4.60×10157 | 4.60×10136 | 1.48×10136 a |
| 200 | 5.00×10371 | 1.00×10374 | 3.22×10356 a |
Table 1 Calculation amount and calculation time of TSP
| 城市数n | 回路数 | 各回路和 | 搜索时间 |
|---|---|---|---|
| 5 | 12 | 60 | 6.00×10-12 s |
| 10 | 1.81×105 | 1.81×106 | 1.81×10-7 s |
| 40 | 1.02×1046 | 4.08×1047 | 1.32×1027 a |
| 100 | 4.60×10157 | 4.60×10136 | 1.48×10136 a |
| 200 | 5.00×10371 | 1.00×10374 | 3.22×10356 a |
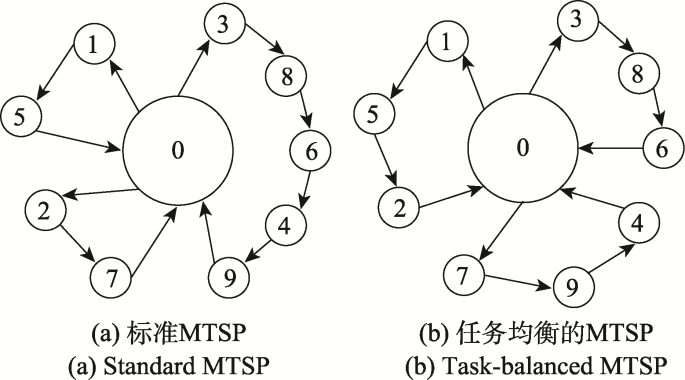
Fig.2 MTSP route plan
| 优化目标 |
|---|
| 最小化任务时间 |
| 最小化能源消耗 |
| 最小化旅行商数目 |
| 最小化最高的总成本(距离或时间) |
Table 2 Segmentation of optimization goals
| 优化目标 |
|---|
| 最小化任务时间 |
| 最小化能源消耗 |
| 最小化旅行商数目 |
| 最小化最高的总成本(距离或时间) |

Fig.3 Main features of MTSP
| 算法 | 文献 | 目标 | 方法 |
|---|---|---|---|
| ACO | 文献[13] | 最小化无人水下航行器总行程 | 多蚁群系统 |
| 文献[14] | 最小化总行程(不区分主体) | 最大-最小蚁群 | |
| 文献[15] | 最小化多机器人巡逻总行程 | 双目标蚁群优化模因算法 | |
| 文献[17] | 最小化物流车辆总车程 | 改进信息素模型 | |
| GA | 文献[18] | 最小化总行程(不区分主体) | 两部分染色体编码 |
| 文献[19] | 复杂突变树多染色体编码 | ||
| 文献[20] | 序列编码的单亲遗传算法 | ||
| 文献[21] | 带繁殖机制的单亲遗传算法 | ||
| 文献[22] | 平衡快递员配送任务 | 杂草算法中引入繁殖机制 | |
| 文献[23] | 最小化总距离(不区分主体) | 非支配排序遗传算法 | |
| 文献[24] | 最小化机器人数量、巡视时间 | 非支配排序遗传算法 | |
| 文献[25] | 节省网络能量,提高数据包传输速率 | 基于平滑路径构建算法 | |
| 文献[26] | 优化网络中消息传递的加权延迟 | 在GA中构建集群节点 | |
| PSO | 文献[27] | 最小化机器人总行程、旅行成本 | 基于帕累托策略的多目标PSO |
| 文献[30] | 平衡多机器人任务分配 | 动态分布式的PSO | |
| 其他 | 文献[31] | 最小化总距离和最大距离最小化 | 基础ABC |
| 文献[34] | 最小化所有无人机飞行距离总和 | 禁忌搜索法 | |
| 文献[16] | 最小化总距离和最大距离最小化 | 模糊逻辑法 | |
| 混合算法 | 文献[35] | 优化无人机数量,最小化无人机路程 | GA和K-means协同优化 |
| 文献[36] | 最小化总行程(不区分主体) | ACO-PGA融合算法 | |
| 文献[37] | 优化任务分配,全局总代价最低 | PSO-AFSA融合算法 | |
| 文献[38] | 最小化护工总路程,平衡工作时间 | ACO与记忆算法混合 |
Table 3 Similarities and differences between optimization objectives and solutions under different algorithms
| 算法 | 文献 | 目标 | 方法 |
|---|---|---|---|
| ACO | 文献[13] | 最小化无人水下航行器总行程 | 多蚁群系统 |
| 文献[14] | 最小化总行程(不区分主体) | 最大-最小蚁群 | |
| 文献[15] | 最小化多机器人巡逻总行程 | 双目标蚁群优化模因算法 | |
| 文献[17] | 最小化物流车辆总车程 | 改进信息素模型 | |
| GA | 文献[18] | 最小化总行程(不区分主体) | 两部分染色体编码 |
| 文献[19] | 复杂突变树多染色体编码 | ||
| 文献[20] | 序列编码的单亲遗传算法 | ||
| 文献[21] | 带繁殖机制的单亲遗传算法 | ||
| 文献[22] | 平衡快递员配送任务 | 杂草算法中引入繁殖机制 | |
| 文献[23] | 最小化总距离(不区分主体) | 非支配排序遗传算法 | |
| 文献[24] | 最小化机器人数量、巡视时间 | 非支配排序遗传算法 | |
| 文献[25] | 节省网络能量,提高数据包传输速率 | 基于平滑路径构建算法 | |
| 文献[26] | 优化网络中消息传递的加权延迟 | 在GA中构建集群节点 | |
| PSO | 文献[27] | 最小化机器人总行程、旅行成本 | 基于帕累托策略的多目标PSO |
| 文献[30] | 平衡多机器人任务分配 | 动态分布式的PSO | |
| 其他 | 文献[31] | 最小化总距离和最大距离最小化 | 基础ABC |
| 文献[34] | 最小化所有无人机飞行距离总和 | 禁忌搜索法 | |
| 文献[16] | 最小化总距离和最大距离最小化 | 模糊逻辑法 | |
| 混合算法 | 文献[35] | 优化无人机数量,最小化无人机路程 | GA和K-means协同优化 |
| 文献[36] | 最小化总行程(不区分主体) | ACO-PGA融合算法 | |
| 文献[37] | 优化任务分配,全局总代价最低 | PSO-AFSA融合算法 | |
| 文献[38] | 最小化护工总路程,平衡工作时间 | ACO与记忆算法混合 |
| 变体 | 优势 | 适用场景 | 局限性 |
|---|---|---|---|
| 人 | 灵活性和自由度高,受限少 | 1. 快递员调度问题 2. 不区分场景的MTSP | 适用场景局限,在领域上很难有创新型突破 |
| 卡车 | 1. 装载能力强:适用于公路长途运输,可以运输大体积货物,是主流物流运输的传统媒介 2. 自主性强:在救援任务中负责救援人员和应急物资的运送 3. 自动化:代替人工执行农业机械的调度任务 | 1. 公路运输 2. 救援任务车辆调度 3. 农业自动化车辆调度 | 有容量和成本的约束,应用场景单一,只能执行传统的地面任务 |
| 无人机 | 1. 成本低:适用于近距离运输和运输小体积物品 2. 机动性强:可以很容易地部署来执行搜索和救援任务或监控给定的区域 | 1. 空中运输 2. 无人机协同任务规划 3. 自然灾害监测 4. 精准农业中农药喷洒 | 有能量的约束,具有不可控性,可能面临无人机的损毁、丢失等问题 |
| 机器人 | 1. 效率高:代替人们完成复杂和危险的任务,节省人工成本和时间 2. 一致性:不受外界因素影响,自动化比人工更可靠 3. 配合度高:执行人机协同任务 | 1. 货物的分拣搬运 2. 搜救和巡逻问题 3. 收集和转发数据 4. 智慧农业中监控与检测 | 缺乏应急能力,同时还需建立安全措施确保机器人不会伤害人员及其他工作设备 |
Table 4 Classification under different variants of MTSP
| 变体 | 优势 | 适用场景 | 局限性 |
|---|---|---|---|
| 人 | 灵活性和自由度高,受限少 | 1. 快递员调度问题 2. 不区分场景的MTSP | 适用场景局限,在领域上很难有创新型突破 |
| 卡车 | 1. 装载能力强:适用于公路长途运输,可以运输大体积货物,是主流物流运输的传统媒介 2. 自主性强:在救援任务中负责救援人员和应急物资的运送 3. 自动化:代替人工执行农业机械的调度任务 | 1. 公路运输 2. 救援任务车辆调度 3. 农业自动化车辆调度 | 有容量和成本的约束,应用场景单一,只能执行传统的地面任务 |
| 无人机 | 1. 成本低:适用于近距离运输和运输小体积物品 2. 机动性强:可以很容易地部署来执行搜索和救援任务或监控给定的区域 | 1. 空中运输 2. 无人机协同任务规划 3. 自然灾害监测 4. 精准农业中农药喷洒 | 有能量的约束,具有不可控性,可能面临无人机的损毁、丢失等问题 |
| 机器人 | 1. 效率高:代替人们完成复杂和危险的任务,节省人工成本和时间 2. 一致性:不受外界因素影响,自动化比人工更可靠 3. 配合度高:执行人机协同任务 | 1. 货物的分拣搬运 2. 搜救和巡逻问题 3. 收集和转发数据 4. 智慧农业中监控与检测 | 缺乏应急能力,同时还需建立安全措施确保机器人不会伤害人员及其他工作设备 |
| [1] |
RABINER L. Book reviews: combinatorial optimization: algorithms and complexity[J]. IEEE ASSP Magazine, 1984, 1(4): 22.
DOI URL |
| [2] |
DANTZIG G B, FULKERSON D R, JOHNSONS M. On a linear-programming, combinatorial approach to the traveling-salesman problem[J]. Operations Research, 1959, 7(1): 58-66.
DOI URL |
| [3] | 许玲. 优化穷举法求旅行商问题的近似最优解[J]. 微型机与应用, 1998, 4(10): 20. |
| XU L. Approximate optimal solution of traveling salesman problem by optimization exhaustive method[J]. Microcomputer and Application, 1998, 4(10): 20. | |
| [4] |
WANG S, LIU M, CHU F. Approximate and exact algorithms for an energy minimization traveling salesman problem[J]. Journal of Cleaner Production, 2020, 249: 119433.
DOI URL |
| [5] | 张松灿, 普杰信, 司彦娜. 基于种群相似度的自适应改进蚁群算法及应用[J]. 计算机工程与应用, 2021, 57(8): 70-77. |
| ZHANG S C, PU J X, CI Y N. Adaptive improved ant colony algorithm based on population similarity and its application[J]. Computer Engineering and Application, 2021, 57(8): 70-77. | |
| [6] | 陈思远, 林丕源, 黄沛杰. 指针网络改进遗传算法求解旅行商问题[J]. 计算机工程与应用, 2020, 56(19): 231-236. |
| CHEN S Y, LIN P Y, HUANG P J. Pointer network improved genetic algorithm for solving traveling salesmen problem[J]. Computer Engineering and Applications, 2020, 56(19): 231-236. | |
| [7] | YU H, ZHANG K. Optimizing the greedy algorithm used in the TSP abstract problems[J]. Applied Mechanics and Materials, 2014, 3512: 2352-2355. |
| [8] | 王原, 陈名, 邢立宁, 等. 用于求解旅行商问题的深度智慧型蚁群优化算法[J]. 计算机研究与发展, 2021, 58(8): 1586-1598. |
| WANG Y, CHEN M, XING L N, et al. Deep intelligent ant colony optimization for solving travelling salesman problem[J]. Computer Research and Development, 2021, 58(8): 1586-1598. | |
| [9] |
VESSELINOVA N, STEINERT R, PEREZ-RAMIREZ D F, et al. Learning combinatorial optimization on graphs: a survey with applications to networking[J]. IEEE Access, 2020, 8: 120388-120416.
DOI URL |
| [10] |
LI J, ZHOU M C, SUN Q, et al. Colored traveling salesman problem[J]. IEEE Transactions on Cybernetics, 2015, 45(11): 2390.
DOI URL |
| [11] |
ALI A I, KENNINGTON J L. The asymmetric M-travelling salesmen problem: a duality based branch-and-bound algori-thm[J]. Discrete Applied Mathematics, 1986, 13(2/3): 259-276.
DOI URL |
| [12] | GAVISH B, SRIKANTH K. An optimal solution method for large-scale multiple traveling salesmen problems[J]. Opera-tions Research, 1986, 34(5): 698-717. |
| [13] | XU Z Z, LI Y P, FENG X S. Constrained multi-objective task assignment for UUVs using multiple ant colonies system[C]// Proceedings of the 2008 ISECS International Collo-quium on Computing, Communication, Control, and Manage-ment, Guangzhou, Aug 3-4, 2008. Piscataway: IEEE, 2008: 462-466. |
| [14] |
LU L C, YUE T W. Mission-oriented ant-team ACO for min-max MTSP[J]. Applied Soft Computing, 2019, 76: 436-444.
DOI URL |
| [15] |
CHEN X, ZHANG P, DU G, et al. Ant colony optimization based memetic algorithm to solve bi-objective multiple trave-ling salesmen problem for multi-robot systems[J]. IEEE Access, 2018, 6: 21745-21757.
DOI URL |
| [16] |
TRIGUI S, CHEIKHROUHOU O, KOUBAA A, et al. FL-MTSP: a fuzzy logic approach to solve the multi-objective multiple traveling salesman problem for multi-robot systems[J]. Soft Computing, 2017, 21(24): 7351-7362.
DOI URL |
| [17] |
WANG M, MA T M, LI G L, et al. Ant colony optimization with an improved pheromone model for solving MTSP with capacity and time window constraint[J]. IEEE Access, 2020, 8: 106872-106879.
DOI URL |
| [18] |
YUAN S, SKINNER B, HUANG S D, et al. A new cross-over approach for solving the multiple travelling salesmen problem using genetic algorithms[J]. European Journal of Operational Research, 2013, 228(1): 72-82.
DOI URL |
| [19] |
叶多福, 刘刚, 何兵. 一种多染色体遗传算法解决多旅行商问题[J]. 系统仿真学报, 2019, 31(1): 36-42.
DOI |
| YE D F, LIU G, HE B. Multi-chromosome genetic algori-thm for multiple traveling salesman problem[J]. Journal of System Simulation, 2019, 31(1): 36-42. | |
| [20] |
ZHOU H L, SONG M L, PEDRYCZ W. A comparative study of improved GA and PSO in solving multiple traveling sale-smen problem[J]. Applied Soft Computing, 2018, 64: 564-580.
DOI URL |
| [21] |
WANG Z J, FANG X, LI H, et al. An improved partheno-genetic algorithm with reproduction mechanism for the mul-tiple traveling salesperson problem[J]. IEEE Access, 2020, 8: 102607-102615.
DOI URL |
| [22] | 胡士娟, 鲁海燕, 黄洋, 等. 求解工作量平衡多旅行商问题的改进遗传算法[J]. 计算机工程与应用, 2019, 55(17): 150-155. |
| HU S J, LU H Y, HUANG Y, et al. Improved genetic algorithm for solving multiple traveling salesman problem with balanced workload[J]. Computer Engineering and Appli-cations, 2019, 55(17): 150-155. | |
| [23] |
BOLAÑOS R I, ECHEVERRY M G, ESCOBAR J W. A multiobjective non-dominated sorting genetic algorithm (NSGA-II) for the multiple traveling salesman problem[J]. Decision Science Letters, 1924, 4(4): 559-568.
DOI URL |
| [24] | KHOUFI I, HADDED M, MINET P, et al. Optimized trajec-tories of multi-robot deploying wireless sensor nodes[C]// Proceedings of the 11th IEEE International Conference on Wireless and Mobile Computing, Networking and Communi-cations, Abu Dhabi, Oct 19-21, 2015. Washington: IEEE Computer Society, 2015: 724-731. |
| [25] |
WICHMANN A, KORKMAZ T. Smooth path construction and adjustment for multiple mobile sinks in wireless sensor networks[J]. Computer Communications, 2015, 72: 93-106.
DOI URL |
| [26] | HAROUNABADI M, BOCKSBERGER M, MITSCHELE-THIEL A. Evolutionary path planning for multiple UAVs in message ferry networks applying genetic algorithm[C]// Pro-ceedings of the 29th IEEE Annual International Symposium on Personal, Indoor and Mobile Radio Communications, Bolog-na, Sep 9-12, 2018. Piscataway: IEEE, 2018: 1-7. |
| [27] |
WEI C Y, JI Z, CAI B L. Particle swarm optimization for cooperative multi-robot task allocation: a multi-objective approach[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2530-2537.
DOI URL |
| [28] | KIM M, HIROYASU T, MIKI M, et al. SPEA2+: improving the performance of the strength Pareto evolutionary algorithm 2[C]// LNCS 3242:Proceedings of the 8th International Con-ference, Birmingham, Sep 18-22, 2004. Berlin, Heidelberg:Springer, 2004: 742-751. |
| [29] | DEB K, AGARWAL S, PRATAP A, et al. A fast and elitist multiobjective genetic algorithm: NSGA-II[J]. IEEE Transac-tions on Evolutionary Computation, 2002, 6(2): 182-197. |
| [30] |
AYARI A, BOUAMAMA S. PSO-based dynamic distributed algorithm for automatic task clustering in a robotic swarm[J]. Procedia Computer Science, 2019, 159: 1103-1112.
DOI URL |
| [31] |
VENKATESH P, SINGH A. Two metaheuristic approaches for the multiple traveling salesperson problem[J]. Applied Soft Computing Journal, 2015, 26: 74-89.
DOI URL |
| [32] |
PANDIRI V, SINGH A. A swarm intelligence approach for the colored traveling salesman problem[J]. Applied Intelligence, 2018, 48(11): 4412-4428.
DOI URL |
| [33] | DONG X, LIN Q, XU M, et al. A.pngicial bee colony algori-thm with generating neighbourhood solution for large scale coloured traveling salesman problem[J]. IET Intelligent Tran-sport Systems, 2019, 13(10): 1483-1491. |
| [34] |
VENKATACHALAM S, SUNDAR K, RATHINAM S. A two-stage approach for routing multiple unmanned aerial vehicles with stochastic fuel consumption[J]. Sensors, 2018, 18(11): 3756.
DOI URL |
| [35] |
JIANG C, WAN Z, PENG Z. A new efficient hybrid algorithm for large scale multiple traveling salesman problems[J]. Expert Systems with Applications, 2020, 139: 112867.
DOI URL |
| [36] | MA Y H, ZHANG H, ZHANG Y Z, et al. Coordinated optimization algorithm combining GA with cluster for multi-UAVs to multi-tasks task assignment and path planning[C]// Proceedings of the 15th IEEE International Conference on Control and Automation, Edinburgh, Jul 16-19, 2019. Pisca-taway: IEEE, 2019: 1026-1031. |
| [37] |
张富震, 朱耀琴. 复杂环境中多无人机协同侦察的任务分配方法[J]. 系统仿真学报, 2022. DOI: 10.16182/j.issn-1004731x.joss.21-0552.
DOI |
|
ZHANG F Z, ZHU Y Q. Task allocation method of multi- UAV cooperative reconnaissance in complex environment[J]. Journal of System Simulation, 2022. DOI: 10.16182/j.issn1004731x.joss.21-0552.
DOI |
|
| [38] | DECERLE J, GRUNDER O, HASSANI A H E, et al. A hybrid memetic-ant colony optimization algorithm for the home health care problem with time window, synchroni-zation and working time balancing[J]. Swarm and Evolu-tionary Computation, 2019, 46: 171-183. |
| [39] | REHMAN K S A. The drivers and barriers of green supply chain management: in the context of manufacturing firms of Pakistan[D]. Xi’an: Chang’an University, 2018. |
| [40] | 袁雨果. 多快递员的电商物流“最后一公里”配送研究[J]. 怀化学院学报, 2017, 36(7): 39-44. |
| YUAN Y G. Study on last mile delivery of multi-couriers e-logistics[J]. Journal of Huaihua University, 2017, 36(7): 39-44. | |
| [41] |
SHI Y, YANG Z F, YAN H, et al. Delivery efficiency and supplier performance evaluation in China’s E-retailing indus-try[J]. Journal of Systems Science and Complexity, 2017, 30(2): 392-410.
DOI URL |
| [42] | 潘成浩, 郭敏. 仓储物流机器人批量拣选路径规划仿真[J]. 计算机与现代化, 2017(2): 12-16. |
| PAN C H, GUO M. Batch picking path planning simulation of warehouse mobile robot[J]. Computer and Modernization, 2017(2): 12-16. | |
| [43] |
MURRAY C C, RAJ R. The multiple flying sidekicks trave-ling salesman problem: parcel delivery with multiple drones[J]. Transportation Research Part C: Emerging Technologies, 2020, 110: 368-398.
DOI URL |
| [44] | KITJACHAROENCHAI P, VENTRESCA M, MOSHREF-JAVADI M, et al. Multiple traveling salesman problem with drones: mathematical model and heuristic approach[J]. Com-puters & Industrial Engineering, 2019, 129: 14-30. |
| [45] | 刘明, 张培勇. 求解多旅行商问题的新混合遗传算法: 以应急物资配送为例[J]. 系统管理学报, 2014, 23(2): 247-254. |
| LIU M, ZHANG P Y. A new hybrid genetic algorithm for solving multi traveling salesman problem: taking emergency material distribution as an example[J]. Journal of System Management, 2014, 23(2): 247-254. | |
| [46] | 姚书婷, 胡志华, 魏晨. 多禁止时间窗约束的路径恢复问题研究[J]. 计算机工程与应用, 2019, 55(12): 265-270. |
| YAO S T, HU Z H, WEI C. Distribution recovery from multiple forbidding time windows at customers[J]. Computer Engineering and Applications, 2019, 55(12): 265-270. | |
| [47] |
CHEN C H, LEE Y C, CHEN A Y. A building information model enabled multiple traveling salesman problem for buil-ding interior patrols[J]. Advanced Engineering Informatics, 2021, 47: 101237.
DOI URL |
| [48] | 陈昕叶. 动态环境下多机器人协同搜救任务分配方法研究[D]. 广州: 华南理工大学, 2020. |
| CHEN X Y. Research on task allocation method of multirobot cooperative search and rescue in dynamic environment[D]. Guangzhou: South China University of Technology, 2020. | |
| [49] | HAYAT S, YANMAZ E, BROWN T X, et al. Multi-objective UAV path planning for search and rescue[C]// Proceedings of the 2017 IEEE International Conference on Robotics and Automation, Singapore, May 29-Jun 3, 2017. Piscataway:IEEE, 2017: 5569-5574. |
| [50] | ZHU Z W, GUO X, DIAO X M. Research on path planning of WSN mobile sink using hybrid immune particle swarm optimization[J]. Microelectronics & Computer, 2018, 35(5): 89-94. |
| [51] |
HUANG H L, SAVKIN A V. Viable path planning for data collection robots in a sensing field with obstacles[J]. Computer Communications, 2017, 111: 84-96.
DOI URL |
| [52] |
WEI Z, XIA C, YUAN X, et al. The path planning scheme for joint charging and data collection in WRSNs: a multi-objective optimization method[J]. Journal of Network and Computer Applications, 2020, 156: 102565.
DOI URL |
| [53] | 徐国训, 梁晓龙, 张佳强, 等. 航空集群多目标群攻击路径规划仿真研究[J]. 计算机仿真, 2017, 34(6): 66-70. |
| XU G X, LIANG X L, ZHANG J Q, et al. Simulation research on path planning of aircraft swarms attacking multi-target group[J]. Computer Simulation, 2017, 34(6): 66-70. | |
| [54] | ZHU X N, ZHU X P, YAN R, et al. Optimal routing, aborting and hitting strategies of UAVs executing hitting the targets considering the defense range of targets[J]. Reliability Engin-eering & System Safety, 2021, 215: 107811. |
| [55] |
CAO Y, WEI W Y, BAI Y, et al. Multi-base multi-UAV co-operative reconnaissance path planning with genetic algori-thm[J]. Cluster Computing, 2019, 22: 5175-5184.
DOI URL |
| [56] | MERNOUT B, MARCO H, TAMÁS K. Complete field coverage as a multi-vehicle routing problem[J]. IFAC Pro-ceedings Volumes, 2013, 46(18): 97-102. |
| [57] | SRIKAKULAPU R, VINATHA U. Optimized design of collector topology for offshore wind farm based on ant colony op-timization with multiple travelling salesman problem[J]. Jour-nal of Modern Power Systems and Clean Energy, 2018, 6: 1181-1192. |
| [58] | 李涛, 邱权, 赵春江, 等. 矮化密植果园多臂采摘机器人任务规划[J]. 农业工程学报, 2021, 37(2): 1-10. |
| LI T, QIU Q, ZHAO C J, et al. Task planning of multi-arm harvesting robots for high-density dwarf orchards[J]. Tran-sactions of the Chinese Society of Agricultural Engineering, 2021, 37(2): 1-10. | |
| [59] | LI X M, MA Z Y, CHU X, et al. A cloud-assisted region monitoring strategy of mobile robot in smart greenhouse[J]. Mobile Information Systems, 2019(1): 1-10. |
| [1] | CAO Kai, CHEN Yangquan, GAO Song, GAO Jiajia. Vortex Artificial-Potential-Field Guided RRT* for Path Planning of Mobile Robot [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(4): 723-732. |
| [2] | ZHANG Qing, LIU Xu, PENG Li, ZHU Fengzeng. Path Planning for Mobile Robots Based on JPS and Improved A* Algorithm [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(11): 2233-2240. |
| [3] | YIN Shaowei, PENG Li, DAI Feifei. Smooth Path Planning Based on Improved A* Ant Colony and Rolling Window Method [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(10): 1969-1979. |
| [4] | JIANG Cheng, ZHANG Jun, LU Shan. Research on Models and Algorithms for Critical Nodes Group Identification Problem in Complex Networks [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(8): 1319-1330. |
| [5] | LIU Xinyu, TAN Liming, YANG Chunxi, ZHAI Chi. Self-Adjustable Dynamic Path Planning of Unknown Environment Based on Ant Colony-Clustering Algorithm [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(5): 846-857. |
| [6] | CHENG Jie1,2+, ZENG Guangzhou1, HE Hong2. Research on migrating instance path planning in migrating workflow system [J]. Journal of Frontiers of Computer Science and Technology, 2008, 2(6): 658-665. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
/D:/magtech/JO/Jwk3_kxyts/WEB-INF/classes/