
Journal of Frontiers of Computer Science and Technology ›› 2022, Vol. 16 ›› Issue (4): 791-805.DOI: 10.3778/j.issn.1673-9418.2111028
• Surveys and Frontiers • Previous Articles Next Articles
FU Xuanyi1, ZHANG Luanjing2, LIANG Wenke2, BI Fangming1,+( ), FANG Weidong3
), FANG Weidong3
Received:2021-11-04
Revised:2022-01-05
Online:2022-04-01
Published:2022-01-17
About author:FU Xuanyi, born in 1996, M.S. candidate, student member of CCF. Her research interests include computer vision and edge computing.
伏轩仪1, 张銮景2, 梁文科2, 毕方明1,+(), 房卫东3
通讯作者:
+ E-mail: bifangming@126.com作者简介:伏轩仪(1996—),女,江苏泰兴人,硕士研究生,CCF学生会员,主要研究方向为计算机视觉、边缘计算。CLC Number:
FU Xuanyi, ZHANG Luanjing, LIANG Wenke, BI Fangming, FANG Weidong. Review on Development of Anchor Mechanism in Object Detection[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(4): 791-805.
伏轩仪, 张銮景, 梁文科, 毕方明, 房卫东. 锚点机制在目标检测领域的发展综述[J]. 计算机科学与探索, 2022, 16(4): 791-805.
Add to citation manager EndNote|Ris|BibTeX
URL: http://fcst.ceaj.org/EN/10.3778/j.issn.1673-9418.2111028

Fig.1 Schematic diagram of anchors in Faster R-CNN

Fig.2 CornerNet detection framework

Fig.3 Numerical procedure of top-left corner pooling
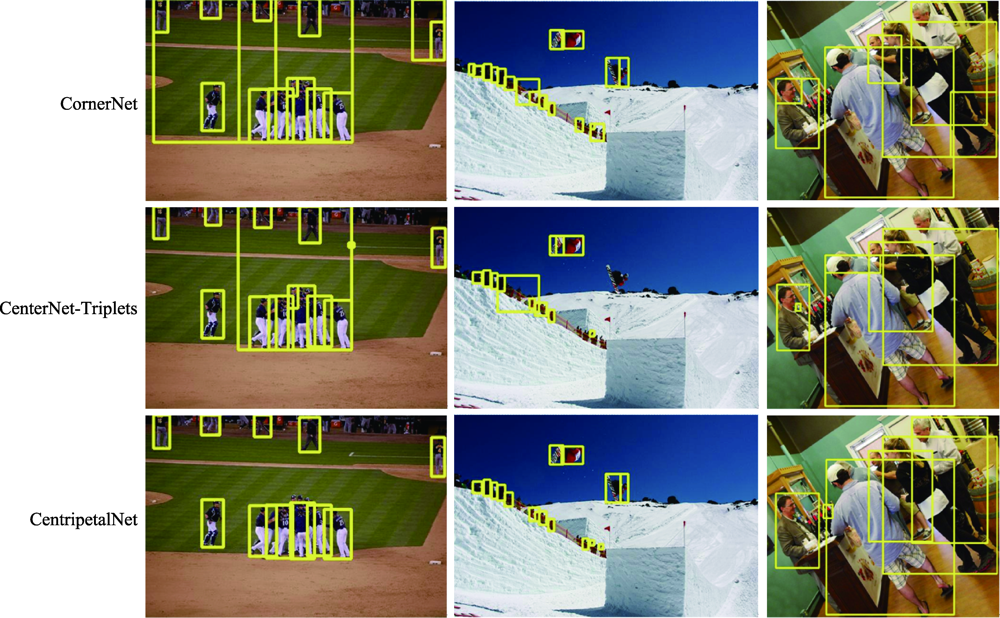
Fig.4 Detection results comparison of key point matching series models

Fig.5 Fully convolutional one-stage object detection framework
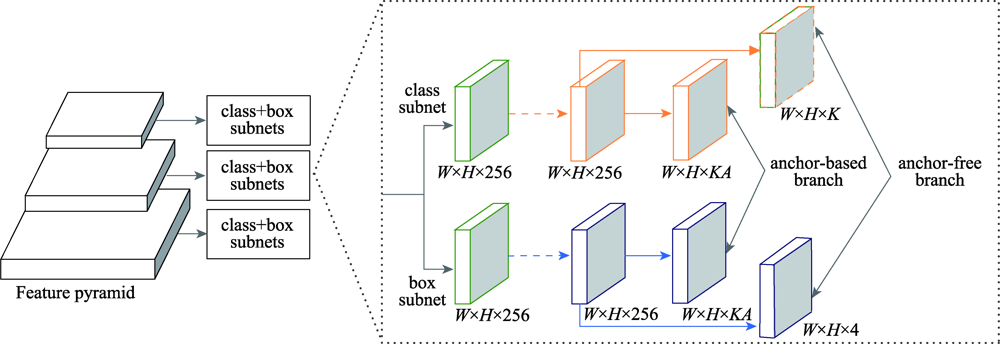
Fig.6 FSAF detection framework

Fig.7 Relationship between detection models based on label assign optimization
| 模型名称 | 先验形式 | 标签分配 | | |
|---|---|---|---|---|
| scale | spatial | |||
| RetinaNet | anchor | size & IoU | IoU | 36.3 |
| FreeAnchor | anchor | size & IoU | top-k weighting,IoU | 38.7 |
| ATSS | anchor | size & IoU | top-k,dynamic IoU | 39.3 |
| FCOS | center | range | radius | 38.7 |
| FSAF | anchor & center | loss | IoU & radius | 37.2 |
| AutoAssign | dynamic center | weighting | weighting | 40.5 |
Table 1 Summary of label assign object detection models
| 模型名称 | 先验形式 | 标签分配 | | |
|---|---|---|---|---|
| scale | spatial | |||
| RetinaNet | anchor | size & IoU | IoU | 36.3 |
| FreeAnchor | anchor | size & IoU | top-k weighting,IoU | 38.7 |
| ATSS | anchor | size & IoU | top-k,dynamic IoU | 39.3 |
| FCOS | center | range | radius | 38.7 |
| FSAF | anchor & center | loss | IoU & radius | 37.2 |
| AutoAssign | dynamic center | weighting | weighting | 40.5 |
| 模型 | 发表会议 | 年份 | 原理 | 优点 | 缺点 | 使用范围 |
|---|---|---|---|---|---|---|
| CornerNet[ | ECCV | 2018 | 检测左上和右下一对角点配对 | 检测思路完全基于关键点;Corner pooling聚焦物体边缘信息 | 本质上仍为矩形包围框;网络对边界敏感,缺乏内部信息 | 目标检测 |
| CornerNet-Lite[ | BMVC | 2020 | 检测左上和右下一对角点配对 | 引入类似人眼扫视的注意力机制;设计轻量化主干网络 | 小物体的误检率高 | 目标检测 |
| ExtremeNet[ | CVPR | 2019 | 检测4个极值点+1个额外的中心点 | 依据几何特征组合关键点 | 枚举法组合关键点效率低 | 目标检测、实例 分割 |
| Objects as Points[ | CVPR | 2019 | 提取目标中心点+回归 | 没有后处理步骤 | 只使用中心点进行回归,可获得的信息少 | 2D/3D目标检测、人体姿态识别 |
| CenterNet2[ | CVPR | 2021 | 将原CenterNet作为两阶段检测模型的第一阶段 | 为两阶段检测器做出概率角度的可解释说明 | — | 目标检测 |
| CenterNet-Triplets[ | ICCV | 2019 | 检测左上和右下一对角点和一个中心关键点 | 结合中心区域检测 | 依赖后处理分组,检测速度慢 | 目标检测 |
| CentripetalNet[ | CVPR | 2020 | 检测角点,结合偏移量进行匹配 | 对相似目标检测效果好 | 中心区域的缩放依赖超参数 | 目标检测、分割 |
| FCOS[ | ICCV | 2019 | 逐像素点分类回归 | 后处理简单增加正样本数量,提高召回率 | 中心度可解释性需要增强 | 目标检测、语义分割、关键点检测 |
| FSAF[ | CVPR | 2019 | 在增加的anchor-free分支上计算focal loss和IoU loss的最小和 | 动态选择最适合目标的特征层 | 与anchor-based分支结合才能取得理想效果 | 小目标检测 |
| ATSS[ | CVPR | 2020 | 根据对象的统计特征自动选择正负样本 | 动态调整IoU阈值 | 自适应过程需要调制超参数 | 目标检测 |
| LSNet[ | CVPR | 2021 | 一个anchor点和多个关键点间的向量确定目标 | 统一多个视觉任务 | 推理速度慢 | 目标检测、实例分割、姿态估计 |
| VFNET[ | CVPR | 2021 | 在FCOS+ATSS的基础上优化包围框的表示 | 变焦损失varifocal loss解决类别不平衡问题 | — | 密集目标检测 |
Table 2 Summary of various anchor-free object detection models
| 模型 | 发表会议 | 年份 | 原理 | 优点 | 缺点 | 使用范围 |
|---|---|---|---|---|---|---|
| CornerNet[ | ECCV | 2018 | 检测左上和右下一对角点配对 | 检测思路完全基于关键点;Corner pooling聚焦物体边缘信息 | 本质上仍为矩形包围框;网络对边界敏感,缺乏内部信息 | 目标检测 |
| CornerNet-Lite[ | BMVC | 2020 | 检测左上和右下一对角点配对 | 引入类似人眼扫视的注意力机制;设计轻量化主干网络 | 小物体的误检率高 | 目标检测 |
| ExtremeNet[ | CVPR | 2019 | 检测4个极值点+1个额外的中心点 | 依据几何特征组合关键点 | 枚举法组合关键点效率低 | 目标检测、实例 分割 |
| Objects as Points[ | CVPR | 2019 | 提取目标中心点+回归 | 没有后处理步骤 | 只使用中心点进行回归,可获得的信息少 | 2D/3D目标检测、人体姿态识别 |
| CenterNet2[ | CVPR | 2021 | 将原CenterNet作为两阶段检测模型的第一阶段 | 为两阶段检测器做出概率角度的可解释说明 | — | 目标检测 |
| CenterNet-Triplets[ | ICCV | 2019 | 检测左上和右下一对角点和一个中心关键点 | 结合中心区域检测 | 依赖后处理分组,检测速度慢 | 目标检测 |
| CentripetalNet[ | CVPR | 2020 | 检测角点,结合偏移量进行匹配 | 对相似目标检测效果好 | 中心区域的缩放依赖超参数 | 目标检测、分割 |
| FCOS[ | ICCV | 2019 | 逐像素点分类回归 | 后处理简单增加正样本数量,提高召回率 | 中心度可解释性需要增强 | 目标检测、语义分割、关键点检测 |
| FSAF[ | CVPR | 2019 | 在增加的anchor-free分支上计算focal loss和IoU loss的最小和 | 动态选择最适合目标的特征层 | 与anchor-based分支结合才能取得理想效果 | 小目标检测 |
| ATSS[ | CVPR | 2020 | 根据对象的统计特征自动选择正负样本 | 动态调整IoU阈值 | 自适应过程需要调制超参数 | 目标检测 |
| LSNet[ | CVPR | 2021 | 一个anchor点和多个关键点间的向量确定目标 | 统一多个视觉任务 | 推理速度慢 | 目标检测、实例分割、姿态估计 |
| VFNET[ | CVPR | 2021 | 在FCOS+ATSS的基础上优化包围框的表示 | 变焦损失varifocal loss解决类别不平衡问题 | — | 密集目标检测 |
| 模型名称 | 主干网络 | 输入图像尺寸 | 处理器配置及实时性指标 | AP/% | AP50/% | AP75/% | APs/% | APm/% | APl/% |
|---|---|---|---|---|---|---|---|---|---|
| SSD[ | ResNet-101 | 300×300 | Titan X 19 frame/s | 31.2 | 50.4 | 33.3 | 10.2 | 34.5 | 49.8 |
| YOLOv3[ | DarkNet-53 | 608×608 | Titan X 45.4 frame/s | 33.0 | 57.9 | 34.4 | 18.3 | 35.4 | 41.9 |
| RetinaNet[ | ResNet-101 | 800×800 | 5 frame/s | 39.1 | 59.1 | 42.3 | 21.8 | 42.7 | 50.2 |
| RefineDet[ | ResNet-101 | 512×512 | Titan X — | 41.8 | 62.9 | 45.7 | 25.6 | 45.1 | 54.1 |
| GFL[ | ResNet-101 | 多尺度 | 2080Ti 10 frame/s | 47.3 | 66.3 | 51.4 | 28.0 | 51.1 | 59.2 |
| EfficientDet[ | EfficientNet-B6[ | 多尺度 | 1080Ti×3 3.8 frame/s | 52.2 | 71.4 | 56.3 | 34.8 | 55.5 | 64.6 |
| CornerNet[ | Hourglass-104 | 511×511 | TitanX (PASCAL)×10 4.1 frame/s | 42.1 | 57.8 | 45.3 | 20.8 | 44.8 | 56.7 |
| CornerNet-Saccade[ | Hourglass-52 | — | 1080Ti×4 5.2 frame/s | 42.6 | — | — | 25.5 | 44.3 | 58.4 |
| CornerNet-Squeeze[ | Hourglass-52 | — | 1080Ti×4 33 frame/s | 34.4 | — | — | — | — | — |
| ExtremeNet[ | Hourglass-104 | 511×511 | TitanX (PASCAL)×10 3.1 frame/s | 43.7 | 60.5 | 47.0 | 24.1 | 46.9 | 57.9 |
| CenterNet-Points[ | DLA-34 | 512×512 | Titan X 7.8 frame/s | 45.1 | 63.9 | 49.3 | 26.6 | 47.1 | 57.7 |
| CenterNet2[ | Res2Net[ DCN-BiFPN | — | Titan Xp — | 56.4 | 74.0 | 61.6 | 38.7 | 59.7 | 68.6 |
| CenterNet-Triplets[ | Hourglass-104 | 511×511 | Tesla P100 340 ms | 47.0 | 64.5 | 50.7 | 28.9 | 49.9 | 58.9 |
| CentripetalNet[ | Hourglass-104 | — | NVIDIA V100×16 | 48.0 | 65.1 | 51.8 | 29.0 | 50.4 | 59.9 |
| FCOS[ | ResNeXt-101[ | — | — | 44.7 | 64.1 | 48.4 | 27.6 | 47.5 | 55.6 |
| FSAF[ | ResNeXt-101 | 800×800 | Tesla V100×8 362 ms | 44.6 | 65.2 | 48.6 | 29.7 | 47.1 | 54.6 |
| ATSS[ | ResNeXt-101-DCN | — | — | 50.7 | 68.9 | 56.3 | 33.2 | 52.9 | 62.4 |
| LSNet[ | Res2Net-101-DCN | 1 333×800 | Tesla V100×8 6.3 frame/s | 53.5 | 71.1 | 59.2 | 35.2 | 56.4 | 65.8 |
| VFNet[ | Res2Net-101-DCN | 1 333×800 | Tesla V100×8 4.2 frame/s | 55.1 | 73.0 | 60.1 | 37.4 | 58.2 | 67.0 |
Table 3 Performance comparison of various object detection models on COCO dataset
| 模型名称 | 主干网络 | 输入图像尺寸 | 处理器配置及实时性指标 | AP/% | AP50/% | AP75/% | APs/% | APm/% | APl/% |
|---|---|---|---|---|---|---|---|---|---|
| SSD[ | ResNet-101 | 300×300 | Titan X 19 frame/s | 31.2 | 50.4 | 33.3 | 10.2 | 34.5 | 49.8 |
| YOLOv3[ | DarkNet-53 | 608×608 | Titan X 45.4 frame/s | 33.0 | 57.9 | 34.4 | 18.3 | 35.4 | 41.9 |
| RetinaNet[ | ResNet-101 | 800×800 | 5 frame/s | 39.1 | 59.1 | 42.3 | 21.8 | 42.7 | 50.2 |
| RefineDet[ | ResNet-101 | 512×512 | Titan X — | 41.8 | 62.9 | 45.7 | 25.6 | 45.1 | 54.1 |
| GFL[ | ResNet-101 | 多尺度 | 2080Ti 10 frame/s | 47.3 | 66.3 | 51.4 | 28.0 | 51.1 | 59.2 |
| EfficientDet[ | EfficientNet-B6[ | 多尺度 | 1080Ti×3 3.8 frame/s | 52.2 | 71.4 | 56.3 | 34.8 | 55.5 | 64.6 |
| CornerNet[ | Hourglass-104 | 511×511 | TitanX (PASCAL)×10 4.1 frame/s | 42.1 | 57.8 | 45.3 | 20.8 | 44.8 | 56.7 |
| CornerNet-Saccade[ | Hourglass-52 | — | 1080Ti×4 5.2 frame/s | 42.6 | — | — | 25.5 | 44.3 | 58.4 |
| CornerNet-Squeeze[ | Hourglass-52 | — | 1080Ti×4 33 frame/s | 34.4 | — | — | — | — | — |
| ExtremeNet[ | Hourglass-104 | 511×511 | TitanX (PASCAL)×10 3.1 frame/s | 43.7 | 60.5 | 47.0 | 24.1 | 46.9 | 57.9 |
| CenterNet-Points[ | DLA-34 | 512×512 | Titan X 7.8 frame/s | 45.1 | 63.9 | 49.3 | 26.6 | 47.1 | 57.7 |
| CenterNet2[ | Res2Net[ DCN-BiFPN | — | Titan Xp — | 56.4 | 74.0 | 61.6 | 38.7 | 59.7 | 68.6 |
| CenterNet-Triplets[ | Hourglass-104 | 511×511 | Tesla P100 340 ms | 47.0 | 64.5 | 50.7 | 28.9 | 49.9 | 58.9 |
| CentripetalNet[ | Hourglass-104 | — | NVIDIA V100×16 | 48.0 | 65.1 | 51.8 | 29.0 | 50.4 | 59.9 |
| FCOS[ | ResNeXt-101[ | — | — | 44.7 | 64.1 | 48.4 | 27.6 | 47.5 | 55.6 |
| FSAF[ | ResNeXt-101 | 800×800 | Tesla V100×8 362 ms | 44.6 | 65.2 | 48.6 | 29.7 | 47.1 | 54.6 |
| ATSS[ | ResNeXt-101-DCN | — | — | 50.7 | 68.9 | 56.3 | 33.2 | 52.9 | 62.4 |
| LSNet[ | Res2Net-101-DCN | 1 333×800 | Tesla V100×8 6.3 frame/s | 53.5 | 71.1 | 59.2 | 35.2 | 56.4 | 65.8 |
| VFNet[ | Res2Net-101-DCN | 1 333×800 | Tesla V100×8 4.2 frame/s | 55.1 | 73.0 | 60.1 | 37.4 | 58.2 | 67.0 |
| 表征形式 | 方法 | 主干网络 | 旋转一致性 |
|---|---|---|---|
| bounding box | CenterNet[ | Hourglass-104 | 0.833 |
| DLA | 0.851 | ||
| bounding circle | CircleNet | Hourglass-104 | 0.875 |
| DLA | 0.886 |
Table 4 Comparison of rotation consistency results
| 表征形式 | 方法 | 主干网络 | 旋转一致性 |
|---|---|---|---|
| bounding box | CenterNet[ | Hourglass-104 | 0.833 |
| DLA | 0.851 | ||
| bounding circle | CircleNet | Hourglass-104 | 0.875 |
| DLA | 0.886 |
| [1] |
LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2):91-110.
DOI URL |
| [2] | DALAL N, TRIGGS B. Histograms of oriented gradients for human detection[C]// Proceedings of the 2005 IEEE Com-puter Society Conference on Computer Vision and Pattern Recognition, San Diego, Jun 20-25, 2005. Washington: IEEE Computer Society, 2005: 886-893. |
| [3] |
KRIZHEVSKY A, SUTSKEVER I, HINTON G. ImageNet classification with deep convolutional neural networks[J]. Communications of the ACM, 2017, 60(6):84-90.
DOI URL |
| [4] | DENG J, DONG W, SOCHER R, et al. ImageNet: a large-scale hierarchical image database[C]// Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, Jun 20-25, 2009. Washington: IEEE Computer Society, 2009: 248-255. |
| [5] | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[J]. arXiv: 1409. 1556, 2014. |
| [6] | SZEGEDY C, LIU W, JIA Y, et al. Going deeper with con-volutions[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, Jun 7-12, 2015. Washington: IEEE Computer Society, 2015: 1-9. |
| [7] | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]// Proceedings of the 2016 IEEE Con-ference on Computer Vision and Pattern Recognition, Las Vegas, Jun 27-30, 2016. Washington: IEEE Computer Soc-iety, 2016: 770-778. |
| [8] |
JIAO L, ZHANG F, LIU F, et al. A survey of deep learning-based object detection[J]. IEEE Access, 2019, 7:128837-128868.
DOI URL |
| [9] | WU X, SAHOO D, HOI S C H. Recent advances in deep learning for object detection[J]. arXiv: 1908. 03673, 2019. |
| [10] |
LIU L, OUYANG W, WANG X, et al. Deep learning for generic object detection: a survey[J]. International Journal of Computer Vision, 2020, 128(2):261-318.
DOI URL |
| [11] | 聂光涛, 黄华. 光学遥感图像目标检测算法综述[J]. 自动化学报, 2021, 47(8):1729-1749. |
| NIE G T, HUANG H. A survey of object detection in optical remote sensing images[J]. Acta Automatica Sinica, 2021, 47(8):1729-1749. | |
| [12] | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intell-igence, 2015, 39(6):1137-1149. |
| [13] | HE K, GKIOXARI G, DOLL R P, et al. Mask R-CNN[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision, Venice, Oct 22-29, 2017. Washington: IEEE Computer Society, 2017: 2980-2988. |
| [14] | HUANG L, YANG Y, DENG Y, et al. DenseBox: unifying landmark localization with end to end object detection[J]. arXiv: 1509. 04874, 2015. |
| [15] |
LIN T, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 42(2):318-327.
DOI URL |
| [16] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]// Proceed-ings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, Jun 27-30, 2016. Washing-ton: IEEE Computer Society, 2016: 779-788. |
| [17] | REDMON J, FARHADI A. YOLO9000: better, faster, str-onger[C]// Proceedings of the 2017 IEEE Conference on Com-puter Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Washington: IEEE Computer Society, 2017: 6517-6525. |
| [18] | REDMON J, FARHADI A. YOLOv3: an incremental impr-ovement[J]. arXiv: 1804. 02767, 2018. |
| [19] | DAI J F, LI Y, HE K M, et al. R-FCN: object detection via region-based fully convolutional networks[C]// Proceedings of the 30th International Conference on Neural Information Processing Systems, Barcelona, Dec 5-10, 2016. Red Hook: Curran Associates, 2016: 379-387. |
| [20] | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector[C]// LNCS 9905: Proceedings of the 14th European Conference on Computer Vision, Amsterdam, Oct 11-14, 2016. Cham: Springer, 2016: 21-37. |
| [21] | SZEGEDY C, REED S, ERHAN D, et al. Scalable, high-quality object detection[J]. arXiv: 1412. 1441, 2014. |
| [22] | FU C Y, LIU W, RANGA A, et al. DSSD: deconvolutional single shot detector[J]. arXiv: 1701. 06659, 2017. |
| [23] | YANG X, YAN J, FENG Z, et al. R3Det: refined single-stage detector with feature refinement for rotating object[J]. arXiv: 1908. 05612, 2019. |
| [24] |
YANG X, SUN H, FU K, et al. Automatic ship detection in remote sensing images from Google earth of complex scenes based on multiscale rotation dense feature pyramid networks[J]. Remote Sensing, 2018, 10(1):132.
DOI URL |
| [25] | HAN J, DING J, LI J, et al. Align deep features for oriented object detection[J]. arXiv: 2008. 09397, 2020. |
| [26] | CAI Z W, FAN Q F, FERIS R S, et al. A unified multi-scale deep convolutional neural network for fast object detection[C]// LNCS 9908: Proceedings of the 14th European Con-ference on Computer Vision, Amsterdam, Oct 11-14, 2016. Cham: Springer, 2016: 354-370. |
| [27] | ZHU C C, TAO R, LUU K, et al. Seeing small faces from robust anchor’s perspective[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, Jun 18-22, 2018. Piscataway: IEEE, 2018: 5127-5136. |
| [28] | KE W, ZHANG T, HUANG Z, et al. Multiple anchor learn-ing for visual object detection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Re-cognition, Seatle, Jun 13-19, 2020. Piscataway: IEEE, 2020: 10203-10212. |
| [29] |
XU Z, XU X, WANG L, et al. Deformable ConvNet with aspect ratio constrained NMS for object detection in remote sensing imagery[J]. Remote Sensing, 2017, 9(12):1312.
DOI URL |
| [30] | REN Y, ZHU C, XIAO S. Deformable faster R-CNN with aggregating multi-layer features for partially occluded object detection in optical remote sensing images[J]. Remote Sens-ing, 2018, 10(9):1470. |
| [31] | YANG T, ZHANG X Y, LI Z M, et al. MetaAnchor: learning to detect objects with customized anchors[C]// Proceedings of the 32nd Conference on Neural Information Processing Systems, Montréal, Dec 3-8, 2018. Red Hook: Curran Ass-ociates, 2018: 318-328. |
| [32] | MA W S, TIAN T Z, XU H, et al. AABO: adaptive anchor box optimization for object detection via Bayesian sub-sampling[C]// LNCS 12350: Proceedings of the 16th Euro-pean Conference on Computer Vision, Glasgow, Aug 23-28, 2020. Cham: Springer, 2020: 560-575. |
| [33] |
PAN S J, YANG Q. A survey on transfer learning[J]. IEEE Transactions on Knowledge and Data Engineering, 2010, 22(10):1345-1359.
DOI URL |
| [34] | LAW H, DENG J. CornerNet: detecting objects as paired keypoints[C]// LNCS 11218: Proceedings of the 15th Euro-pean Conference on Computer Vision, Munich, Sep 8-14, 2018. Cham: Springer, 2018: 765-781. |
| [35] | LAW H, TENG Y, RUSSAKOVSKY O, et al. CornerNet-Lite: efficient keypoint based object detection[J]. arXiv: 1904. 08900, 2019. |
| [36] | ZHOU X Y, ZHUO J C, KRÄHENBÜHL P. Bottom-up object detection by grouping extreme and center points[J]. arXiv: 1901. 08043, 2019. |
| [37] | ZHOU X Y, WANG D Q, KRÄHENBÜHL P. Objects as points[J]. arXiv: 1904. 07850, 2019. |
| [38] | ZHOU X Y, KOLTUN V, KRÄHENBÜHL P. Probabilistic two-stage detection[J]. arXiv: 2103. 07461, 2021. |
| [39] | NEWELL A, HUANG Z, DENG J. Associative embedding: end-to-end learning for joint detection and grouping[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, Dec 4-9, 2017. Red Hook: Curran Associates, 2017: 2277-2287. |
| [40] | IANDOLA F N, HAN S, MOSKEWICZ M W, et al. Squeeze-Net: AlexNet-level accuracy with 50x fewer parameters and <0.5 MB model size[J]. arXiv: 1602. 07360, 2016. |
| [41] | HOWARD A G, ZHU M L, CHEN B, et al. MobileNets: eff-icient convolutional neural networks for mobile vision app-lications[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Washington: IEEE Computer Society, 2017: 7341-7349. |
| [42] | DUAN K, BAI S, XIE L X, et al. CenterNet: keypoint triplets for object detection[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Oct 27-Nov 2, 2019. Piscataway: IEEE, 2019: 6568-6577. |
| [43] | DONG Z W, LI G X, LIAO Y, et al. CentripetalNet: pursu-ing high-quality keypoint pairs for object detection[C]// Pro-ceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, Jun 13-19, 2020. Piscataway: IEEE, 2020: 10516-10525. |
| [44] | TIAN Z, SHEN C H, CHEN H, et al. FCOS: fully convolu-tional one-stage object detection[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Oct 27-Nov 2, 2019. Piscataway: IEEE, 2019: 9626-9635. |
| [45] | DUAN K W, XIE L X, QI H G, et al. Location-sensitive vis-ual recognition with cross-IOU loss[J]. arXiv: 2104. 04899,2021. |
| [46] | ZHANG S F, CHI C, YAO Y Q, et al. Bridging the gap be-tween anchor-based and anchor-free detection via adaptive training sample selection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recogni-tion, Seattle, Jun 13-19, 2020. Piscataway: IEEE, 2020: 9756-9765. |
| [47] | DAI J F, QI H Z, XIONG Y W, et al. Deformable convolu-tional networks[C]// Proceedings of the 2017 IEEE Interna-tional Conference on Computer Vision, Venice, Oct 22-29, 2017. Washington: IEEE Computer Society, 2017: 764-773. |
| [48] | AHN S, CHANG J W, KANG S J. An efficient accelerator design methodology for deformable convolutional networks[C]// Proceedings of the 2020 IEEE International Confer-ence on Image Processing, Oct 25-28, 2020. Washington: IEEE Computer Society, 2020: 3075-3079. |
| [49] | 邓志鹏, 孙浩, 雷琳, 等. 基于多尺度形变特征卷积网络的高分辨率遥感影像目标检测[J]. 测绘学报, 2018, 47(9):1216-1227. |
| DENG Z P, SUN H, LEI L, et al. Object detection in remote sensing imagery with multi-scale deformable convolutional networks[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(9):1216-1227. | |
| [50] | ZHANG H Y, WANG Y, DAYOUB F, et al. VarifocalNet: an iou-aware dense object detector[J]. arXiv: 2008. 13367, 2020. |
| [51] | ZHU C C, HE Y H, SAVVIDES M. Feature selective anchor-free module for single-shot object detection[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 15-20, 2019. Pisca-taway: IEEE, 2019: 840-849. |
| [52] | CAO Y H, CHEN K, LOY C C, et al. Prime sample atten-tion in object detection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recogni-tion, Seattle, Jun 13-19, 2020. Piscataway: IEEE, 2020: 11580-11588. |
| [53] | ZHANG X S, WAN F, LIU C, et al. FreeAnchor: learning to match anchors for visual object detection[C]// Proceedings of the Annual Conference on Neural Information Processing Systems, Vancouver, Dec 8-14, 2019. California: NeurIPS, 2019: 147-155. |
| [54] | ZHU B J, WANG J F, JIANG Z K, et al. AutoAssign: diff-erentiable label assignment for dense object detection[J]. arXiv: 2007. 03496, 2020. |
| [55] | ZHANG S F, WEN L Y, BIAN X, et al. Single-shot refine-ment neural network for object detection[C]// Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, Jun 18-23, 2018. Washington: IEEE Computer Society, 2018: 4203-4212. |
| [56] | LIN T Y, DOLLÁR P, GIRSHICK R B, et al. Feature pyr-amid networks for object detection[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Washington: IEEE Computer Society, 2017: 936-944. |
| [57] | LI X, WANG W H, WU L J, et al. Generalized focal loss: learning qualified and distributed bounding boxes for dense object detection[J]. arXiv: 2006. 04388, 2020. |
| [58] | TAN M X, PANG R M, LE Q V. EfficientDet: scalable and efficient object detection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Reco-gnition, Seattle, Jun 13-19, 2020. Piscataway: IEEE, 2020: 10778-10787. |
| [59] | TAN M X, LE Q V. EfficientNet: rethinking model scaling for convolutional neural networks[C]// Proceedings of the 36th International Conference on Machine Learning, Long Beach, Jun 9-15, 2019: 6105-6114. |
| [60] |
GAO S H, CHENG M M, ZHAO K, et al. Res2Net: a new multi-scale backbone architecture[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 43(2):652-662.
DOI URL |
| [61] | XIE S N, GIRSHICK R B, DOLLÁR P, et al. Aggregated residual transformations for deep neural networks[C]// Pro-ceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Wash-ington: IEEE Computer Society, 2017: 5987-5995. |
| [62] |
LIU X, DI X, WU J, et al. Vector encoded bounding box regression for detecting remote-sensing objects with anchor-free methods[J]. International Journal of Remote Sensing, 2021, 42(2):693-713.
DOI URL |
| [63] | 蒋光峰, 胡鹏程, 叶桦, 等. 基于旋转中心点估计的遥感目标精确检测算法[J]. 计算机应用研究, 2021, 38(9):2866-2870. |
| JIANG G F, HU P C, YE H, et al. Remote sensing target accurate detection algorithm based on rotation center point estimation[J]. Application Research of Computers, 2021, 38(9):2866-2870. | |
| [64] |
CAO H C, PU S L, TAN W M, et al. Breast mass detection in digital mammography based on anchor-free architecture[J]. Computer Methods and Programs in Biomedicine, 2021, 205:106033.
DOI URL |
| [65] | LUO X D, SONG T, WANG G T, et al. SCPM-Net: an anchor-free 3D lung nodule detection network using sphere repre-sentation and center points matching[J]. arXiv: 2104. 05215, 2021. |
| [66] |
ZHE L, XI X, SONG Y Q, et al. MLANet: multi-layer anchor-free network for generic lesion detection[J]. Engineering Applications of Artificial Intelligence, 2021, 102:104255.
DOI URL |
| [67] | YANG H C, DENG R N, LU Y Z, et al. CircleNet: anchor-free glomerulus detection with circle representation[C]// LNCS 12264: Proceedings of the 23rd International Conference on Medical Image Computing and Computer Assisted Interven-tion, Lima, Oct 4-8, 2020. Cham: Springer, 2020: 35-44. |
| [68] |
ZHENG Z, LIU W, WANG H, et al. Real-time enumeration of metro passenger volume using anchor-free object detec-tion network on edge devices[J]. IEEE Access, 2021, 9:21593-21603.
DOI URL |
| [69] |
范红超, 李万志, 章超权. 基于Anchor-free的交通标志检测[J]. 地球信息科学学报, 2020, 22(1):88-99.
DOI |
| FAN H C, LI W Z, ZHANG C Q. Anchor-free traffic sign detection[J]. Journal of Geo-Information Science, 2020, 22(1):88-99. | |
| [70] | 梁礼明, 熊文, 蓝智敏, 等. 改进的CornerNet-Saccade车辆检测算法[J]. 重庆理工大学学报(自然科学), 2021, 35(6):137-146. |
| LIANG L M, XIONG W, LAN Z M, et al. Improved CornerNet-Saccade algorithm for vehicle detection[J]. Jour-nal of Chongqing University of Technology (Natural Science), 2021, 35(6):137-146. | |
| [71] | 何泽文, 张文生. 保持高分辨率信息的无锚点框检测算法[J]. 计算机辅助设计与图形学学报, 2021, 33(4):580-589. |
| HE Z W, ZHANG W S. High resolution information reser-ved anchor-free detection algorithm[J]. Journal of Computer-Aided Design & Computer Graphics, 2021, 33(4):580-589. | |
| [72] | 黄思维, 李志丹, 程吉祥, 等. 基于多特征融合的轻量化无锚人脸检测方法[J/OL]. 计算机工程与应用(2021-04-12) [2021-08-25]. https://kns.cnki.net/kcms/detail/11.2127.TP.20210409.1746.030.html. |
| HUANG S W, LI Z D, CHENG J X, et al. Light-weight an-chor free face detection based on multi feature fusion[J/OL]. Computer Engineering and Applications(2021-04-12) [2021-08-25]. https://kns.cnki.net/kcms/detail/11.2127.TP.20210409.1746.030.html. | |
| [73] | 李晨瑄, 顾佼佼, 王磊, 等. 多尺度特征融合的Anchor-Free轻量化舰船要害检测算法[J/OL]. 北京航空航天大学学报(2021-04-26)[2021-08-23]. https://kns.cnki.net/kcms/detail/11.2625.V.20210425.1724.001.html. |
| LI C X, GU J J, WANG L, et al. Warship’s vital parts detec-tion algorithm based on lightweight Anchor-Free network with multi-scale feature fusion[J/OL]. Journal of Beijing Un-iversity of Aeronautics and Astronautics(2021-04-26)[2021-08-23]. https://kns.cnki.net/kcms/detail/11.2625.V.20210425.1724.001.html. | |
| [74] | YU F, WANG D Q, SHELHAMER E, et al. Deep layer agg-regation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, Jun 18-22, 2018. Piscataway: IEEE, 2018: 2403-2412. |
| [1] | SUN Fangwei, LI Chengyang, XIE Yongqiang, LI Zhongbo, YANG Caidong, QI Jin. Review of Deep Learning Applied to Occluded Object Detection [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(6): 1243-1259. |
| [2] | ZHAO Pengfei, XIE Linbo, PENG Li. Deep Small Object Detection Algorithm Integrating Attention Mechanism [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(4): 927-937. |
| [3] | WANG Yanni, YU Lixian. SSD Object Detection Algorithm with Effective Fusion of Attention and Multi-scale [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(2): 438-447. |
| [4] | RUAN Chenzhao, ZHANG Xiangsen, LIU Ke, ZHAO Zengshun. Progress on Human-Object Interaction Detection of Deep Learning [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(2): 323-336. |
| [5] | LI Kecen, WANG Xiaoqiang, LIN Hao, LI Leixiao, YANG Yanyan, MENG Chuang, GAO Jing. Survey of One-Stage Small Object Detection Methods in Deep Learning [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(1): 41-58. |
| [6] | LI Zhixin, CHEN Shengjia, ZHOU Tao, MA Huifang. Combining Cascaded Network and Adversarial Network for Object Detection [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(1): 217-230. |
| [7] | WANG Dicong, BAI Chenshuai, WU Kaijun. Survey of Video Object Detection Based on Deep Learning [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(9): 1563-1577. |
| [8] | FANG Junting, TAN Xiaoyang. Defect Detection of Metal Surface Based on Attention Cascade R-CNN [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(7): 1245-1254. |
| [9] | SHI Caijuan, ZHANG Weiming, CHEN Houru, GE Lulu. Survey of Salient Object Detection Based on Deep Learning [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(2): 219-232. |
| [10] | CHEN Ruilong, LUO Lei, CAI Zhiping, MA Wentao. Algorithm for Real-Time Smoking Detection Based on Deep Learning [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(2): 327-337. |
| [11] | LI Wentao, PENG Li. Small Objects Detection Algorithm with Multi-scale Channel Attention Fusion Network [J]. Journal of Frontiers of Computer Science and Technology, 2021, 15(12): 2390-2400. |
| [12] | LIANG Yanyu, LI Jinbao. Small Objects Detection Method Based on Multi-scale Non-local Attention Network [J]. Journal of Frontiers of Computer Science and Technology, 2020, 14(10): 1744-1753. |
| [13] | CHEN Huanjie, WANG Qiqi, YANG Guowei, HAN Jialin, YIN Chengjuan, CHEN Jun, WANG Yizhong. SSD Object Detection Algorithm with Multi-Scale Convolution Feature Fusion [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(6): 1049-1061. |
| [14] | ZHANG Shoudong, YANG Ming, HU Tai. Salient Object Detection Algorithm Based on Multi-Feature Fusion [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(5): 834-845. |
| [15] | GUO Wei, BAI Wenshuo, QU Haicheng. Face Recognition Algorithm of Occlusion Location Based on PCANet [J]. Journal of Frontiers of Computer Science and Technology, 2019, 13(12): 2149-2160. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
/D:/magtech/JO/Jwk3_kxyts/WEB-INF/classes/