
Journal of Frontiers of Computer Science and Technology ›› 2022, Vol. 16 ›› Issue (7): 1504-1515.DOI: 10.3778/j.issn.1673-9418.2111105
• Surveys and Frontiers • Previous Articles Next Articles
LIU Yi1,+( ), LI Mengmeng1, ZHENG Qibin2, QIN Wei1, REN Xiaoguang1
), LI Mengmeng1, ZHENG Qibin2, QIN Wei1, REN Xiaoguang1
Received:2021-11-22
Revised:2022-01-20
Online:2022-07-01
Published:2022-07-25
Supported by:
刘艺1,+(), 李蒙蒙1, 郑奇斌2, 秦伟1, 任小广1
作者简介:刘艺(1990—),男,安徽蚌埠人,博士,助理研究员,主要研究方向为机器人操作系统、数据质量、演化算法。 基金资助:CLC Number:
LIU Yi, LI Mengmeng, ZHENG Qibin, QIN Wei, REN Xiaoguang. Survey on Video Object Tracking Algorithms[J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1504-1515.
刘艺, 李蒙蒙, 郑奇斌, 秦伟, 任小广. 视频目标跟踪算法综述[J]. 计算机科学与探索, 2022, 16(7): 1504-1515.
Add to citation manager EndNote|Ris|BibTeX
URL: http://fcst.ceaj.org/EN/10.3778/j.issn.1673-9418.2111105

Fig.1 Challenges of video object tracking
| 特征 | 优点 | 缺点 |
|---|---|---|
| 深层特征 | 包含高层语义信息,对目标外观变化具有不变性,鲁棒性较强 | 空间分辨率较低,无法精确定位,容易导致目标漂移,准确性较弱 |
| 浅层特征 | 空间分辨率高,适合高精度定位,准确性较高 | 目标跟踪的鲁棒性较弱 |
Table 1 Comparison of deep and shallow features
| 特征 | 优点 | 缺点 |
|---|---|---|
| 深层特征 | 包含高层语义信息,对目标外观变化具有不变性,鲁棒性较强 | 空间分辨率较低,无法精确定位,容易导致目标漂移,准确性较弱 |
| 浅层特征 | 空间分辨率高,适合高精度定位,准确性较高 | 目标跟踪的鲁棒性较弱 |
| 类型 | 文献 | 算法名称 | 特点 | 优点 | 缺点 |
|---|---|---|---|---|---|
| 相关滤波 | [5] | MOSSE | 将相关滤波引入到视频目标跟踪领域,用滤波器与候选区域的特征图做卷积操作,响应最大值所在位置即为当前帧跟踪目标所在位置 | 速度快,可达669 frame/s | 精度较低,单通道灰度特征 |
| 核相关 | [7] | CSK | 增加了正则化项,有效地防止了滤波器的过拟合;采用循环矩阵的方法进行稠密采样;引入了核技巧,提高了算法在高维空间中的速度 | 速度快,计算量有所减少 | 单一尺度,单通道灰度特征 |
| [8] | KCF/DCF | 训练了一个目标检测器,判断预测位置是否为目标位置;引进了基于多通道的HOG特征 | 速度快,可达172 frame/s;多通道HOG特征,精度显著提升 | 单一尺度 | |
| [13] | 鲁棒跟踪算法 | 将灰度特征、HOG特征、LAB颜色特征进行融合;提出损失辨别和重定位策略缓解目标遮挡问题;采用多尺度滤波器缓解目标漂移的问题 | 中心位置误差较低 | 仅采用手工特征,未结合深度特征 | |
| [14] | HKCF | 针对卫星数据进行研究,有效缓解了目标较小且与背景相似的问题 | 特征融合,速度快,可达100 frame/s | 仅采用手工特征,未结合深度特征 | |
| 多尺度跟踪 | [11] | DSST | 将视频目标跟踪看作目标中心平移和目标尺度变化两个独立的问题,训练了两个滤波器:平移滤波器和尺度滤波器 | 33个尺度,多尺度跟踪,精度 较高 | 速度较慢25.4 frame/s,边界效应 |
| [10] | SAMF | HOG特征、颜色特征和灰度特征融合;提出尺度池策略,小范围内实现了尺度自适应跟踪 | HOG、颜色、灰度特征融合,7个尺度跟踪,提高精度 | 仅在尺度池内效果较好,没有做到真正意义的自适应 | |
| [16] | 尺度自适应算法 | 从ResNet网络的不同层提取特征生成响应图,然后基于AdaBoost算法进行融合,再利用尺度滤波器估计目标尺寸,实现准确跟踪 | 多特征融合,尺度滤波器 | 速度较慢;未采用手工特征,鲁棒性较差 | |
| [17] | 可变尺度学习跟踪算法 | 尺度因子可学习,不断调整;多尺度跟踪框纵横比方法共同缓解目标尺度变化问题 | 针对尺度变化问题效果较好 | 未进行特征融合 | |
| 多特征融合 | [27] | C-COT | 将深度特征和手工特征(HOG特征和颜色特征)进行融合 | 13个滤波器,跟踪精度较高 | 速度较慢1.5 frame/s,算法参数较多 |
| [30] | UPDT | 系统地分析了深层和浅层特征在视频目标跟踪中的影响,提出一种深层和浅层特征自适应融合的跟踪算法 | 精度较高 | 虽然速度有所提升,但仍较慢 | |
| [31] | ACM | 融合目标和搜索区域中不同尺寸的特征图,结合先验信息和视觉特征,可以容易地集成到现有跟踪器中 | 泛化性能较好,可直接集成到其他跟踪器中 | 跟踪效果与选用的跟踪器关系较大 |
Table 2 Video object tracking algorithms based on correlation filter
| 类型 | 文献 | 算法名称 | 特点 | 优点 | 缺点 |
|---|---|---|---|---|---|
| 相关滤波 | [5] | MOSSE | 将相关滤波引入到视频目标跟踪领域,用滤波器与候选区域的特征图做卷积操作,响应最大值所在位置即为当前帧跟踪目标所在位置 | 速度快,可达669 frame/s | 精度较低,单通道灰度特征 |
| 核相关 | [7] | CSK | 增加了正则化项,有效地防止了滤波器的过拟合;采用循环矩阵的方法进行稠密采样;引入了核技巧,提高了算法在高维空间中的速度 | 速度快,计算量有所减少 | 单一尺度,单通道灰度特征 |
| [8] | KCF/DCF | 训练了一个目标检测器,判断预测位置是否为目标位置;引进了基于多通道的HOG特征 | 速度快,可达172 frame/s;多通道HOG特征,精度显著提升 | 单一尺度 | |
| [13] | 鲁棒跟踪算法 | 将灰度特征、HOG特征、LAB颜色特征进行融合;提出损失辨别和重定位策略缓解目标遮挡问题;采用多尺度滤波器缓解目标漂移的问题 | 中心位置误差较低 | 仅采用手工特征,未结合深度特征 | |
| [14] | HKCF | 针对卫星数据进行研究,有效缓解了目标较小且与背景相似的问题 | 特征融合,速度快,可达100 frame/s | 仅采用手工特征,未结合深度特征 | |
| 多尺度跟踪 | [11] | DSST | 将视频目标跟踪看作目标中心平移和目标尺度变化两个独立的问题,训练了两个滤波器:平移滤波器和尺度滤波器 | 33个尺度,多尺度跟踪,精度 较高 | 速度较慢25.4 frame/s,边界效应 |
| [10] | SAMF | HOG特征、颜色特征和灰度特征融合;提出尺度池策略,小范围内实现了尺度自适应跟踪 | HOG、颜色、灰度特征融合,7个尺度跟踪,提高精度 | 仅在尺度池内效果较好,没有做到真正意义的自适应 | |
| [16] | 尺度自适应算法 | 从ResNet网络的不同层提取特征生成响应图,然后基于AdaBoost算法进行融合,再利用尺度滤波器估计目标尺寸,实现准确跟踪 | 多特征融合,尺度滤波器 | 速度较慢;未采用手工特征,鲁棒性较差 | |
| [17] | 可变尺度学习跟踪算法 | 尺度因子可学习,不断调整;多尺度跟踪框纵横比方法共同缓解目标尺度变化问题 | 针对尺度变化问题效果较好 | 未进行特征融合 | |
| 多特征融合 | [27] | C-COT | 将深度特征和手工特征(HOG特征和颜色特征)进行融合 | 13个滤波器,跟踪精度较高 | 速度较慢1.5 frame/s,算法参数较多 |
| [30] | UPDT | 系统地分析了深层和浅层特征在视频目标跟踪中的影响,提出一种深层和浅层特征自适应融合的跟踪算法 | 精度较高 | 虽然速度有所提升,但仍较慢 | |
| [31] | ACM | 融合目标和搜索区域中不同尺寸的特征图,结合先验信息和视觉特征,可以容易地集成到现有跟踪器中 | 泛化性能较好,可直接集成到其他跟踪器中 | 跟踪效果与选用的跟踪器关系较大 |

Fig.2 Architecture of siamese network
| 数据集 | 年份 | 视频数 | 帧数 | 平均长度/帧 | 类别 | 特点 |
|---|---|---|---|---|---|---|
| OTB-2013 | 2013 | 51 | 29 000 | 578 | 10 | 包含25%的灰度序列;11种常见的视频属性标注:光照变化、尺度变化、遮挡、形变、运动模糊、快速移动、平面内旋转、平面外旋转、消失、相似背景干扰、低分辨率;随机帧开始 |
| OTB-2015 | 2015 | 98 | 59 000 | 598 | 16 | 在OTB-2013的基础上增加了视频序列 |
| VOT | 2013 | 16 | — | — | — | 为彩色序列,平均时长较短,分辨率较高;第一帧初始化开始;VOT2018和VOT2019均在VOT2017的基础上加入了长时跟踪视频序列 |
| 2014 | 25 | 10 000 | 409 | 11 | ||
| 2015 | 60 | 22 000 | 358 | 24 | ||
| 2016 | 60 | 22 000 | 358 | 24 | ||
| 2017 | 60 | 22 000 | 356 | 24 | ||
| 2018 | 60 | 22 000 | 356 | 24 | ||
| 2019 | 60 | 22 000 | 356 | 24 | ||
| UAV123 | 2016 | 123 | 113 000 | 915 | 9 | 特殊场景数据集,均由低空无人机捕获;视频序列背景干净,视角变化丰富 |
| UAV20L | 2016 | 20 | 59 000 | 2 934 | 5 | 视频序列平均时长较长,常应用于长时跟踪 |
| TrackingNet | 2018 | 30 643 | 14 432 000 | 467 | 27 | 规模较大,主要针对野外目标的短时跟踪;训练集和测试集互不相交 |
| GOT-10K | 2019 | 10 000 | 1 500 000 | 150 | 563 | 数据集种类较多,时长较短,常应用于短时跟踪;训练集和测试集互不相交 |
| LaSOT | 2019 | 1 400 | 3 520 000 | 2 506 | 70 | 大规模的长时跟踪数据集;提供了可视化的边界框注释,当目标消失时,出现“目标不存在”的注释 |
Table 3 Datasets widely used in field of video object tracking
| 数据集 | 年份 | 视频数 | 帧数 | 平均长度/帧 | 类别 | 特点 |
|---|---|---|---|---|---|---|
| OTB-2013 | 2013 | 51 | 29 000 | 578 | 10 | 包含25%的灰度序列;11种常见的视频属性标注:光照变化、尺度变化、遮挡、形变、运动模糊、快速移动、平面内旋转、平面外旋转、消失、相似背景干扰、低分辨率;随机帧开始 |
| OTB-2015 | 2015 | 98 | 59 000 | 598 | 16 | 在OTB-2013的基础上增加了视频序列 |
| VOT | 2013 | 16 | — | — | — | 为彩色序列,平均时长较短,分辨率较高;第一帧初始化开始;VOT2018和VOT2019均在VOT2017的基础上加入了长时跟踪视频序列 |
| 2014 | 25 | 10 000 | 409 | 11 | ||
| 2015 | 60 | 22 000 | 358 | 24 | ||
| 2016 | 60 | 22 000 | 358 | 24 | ||
| 2017 | 60 | 22 000 | 356 | 24 | ||
| 2018 | 60 | 22 000 | 356 | 24 | ||
| 2019 | 60 | 22 000 | 356 | 24 | ||
| UAV123 | 2016 | 123 | 113 000 | 915 | 9 | 特殊场景数据集,均由低空无人机捕获;视频序列背景干净,视角变化丰富 |
| UAV20L | 2016 | 20 | 59 000 | 2 934 | 5 | 视频序列平均时长较长,常应用于长时跟踪 |
| TrackingNet | 2018 | 30 643 | 14 432 000 | 467 | 27 | 规模较大,主要针对野外目标的短时跟踪;训练集和测试集互不相交 |
| GOT-10K | 2019 | 10 000 | 1 500 000 | 150 | 563 | 数据集种类较多,时长较短,常应用于短时跟踪;训练集和测试集互不相交 |
| LaSOT | 2019 | 1 400 | 3 520 000 | 2 506 | 70 | 大规模的长时跟踪数据集;提供了可视化的边界框注释,当目标消失时,出现“目标不存在”的注释 |
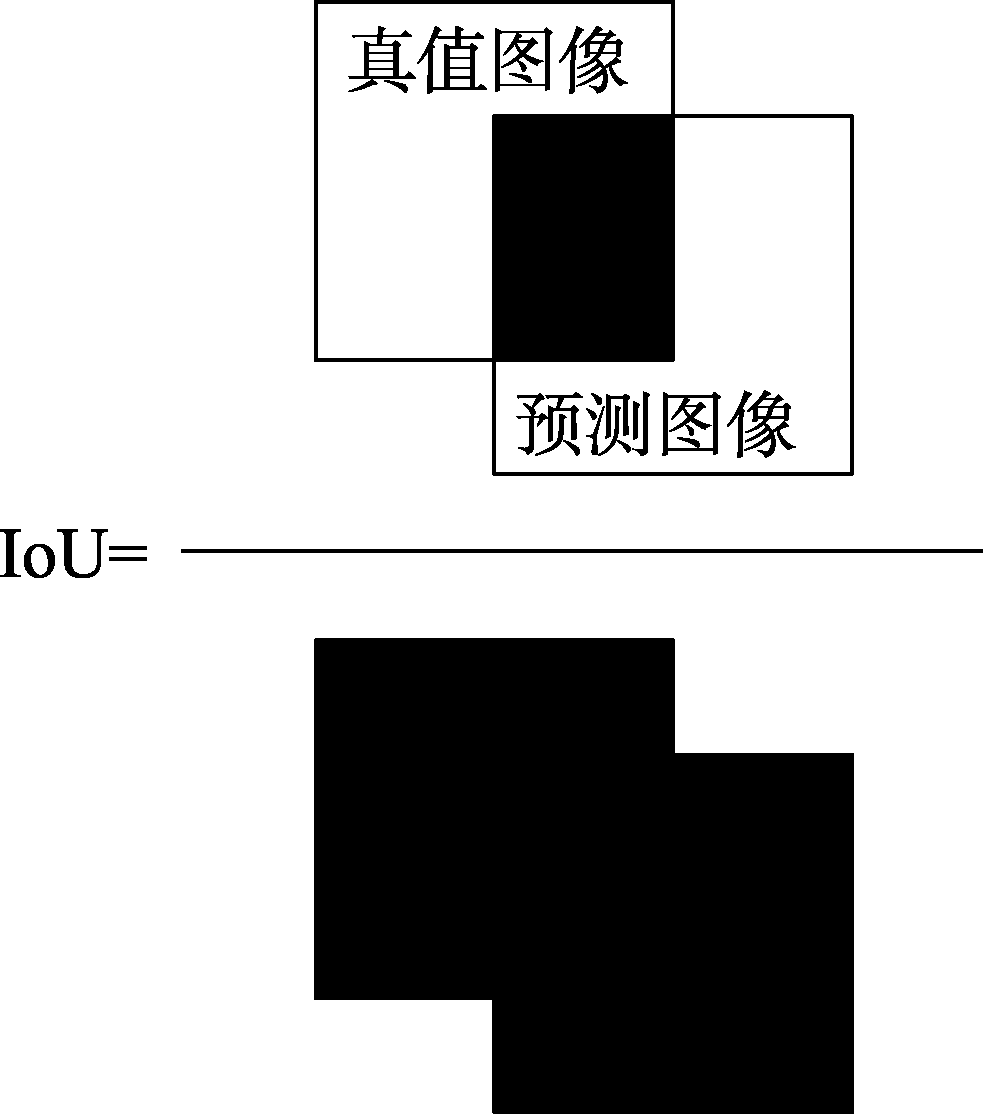
Fig.3 Calculation graph of IoU
| [1] | 李玺, 查宇飞, 张天柱, 等. 深度学习的目标跟踪算法综述[J]. 中国图象图形学报, 2019, 24(12): 2057-2080. |
| LI X, ZHA Y F, ZHANG T Z, et al. Survey of visual object tracking algorithms based on deep learning[J]. Journal of Image and Graphics, 2019, 24(12): 2057-2080. | |
| [2] | LIANG J W, JIANG L, NIEBLES J C, et al. Peeking into the future: predicting future person activities and locations in videos[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscataway: IEEE, 2019: 5725-5734. |
| [3] | JANI D, MANKODIA A. Comprehensive analysis of object detection and tracking methodologies from surveillance videos[C]// Proceedings of the 2021 International Conference on Computing Methodologies and Communication, Erode, Apr 8-10, 2021. Piscataway: IEEE, 2021: 963-970. |
| [4] | LI P, CHEN X, SHEN S. Stereo R-CNN based 3D object detection for autonomous driving[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscataway: IEEE, 2019: 7644-7652. |
| [5] | BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters[C]// Procee-dings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, Jun 13-18, 2010. Washin-gton: IEEE Computer Society, 2010: 2544-2550. |
| [6] |
KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks[J]. Communications of the ACM, 2017, 60(6): 84-90.
DOI URL |
| [7] | HENRIQUES J F, CASEIRO R, MARTINS P, et al. Exploi-ting the circulant structure of tracking-by-detection with ker-nels[C]// LNCS 7575: Proceedings of the 12th European Confe-rence on Computer Vision, Florence, Oct 7-13, 2012. Berlin, Heidelberg: Springer, 2012: 702-715. |
| [8] |
HENRIQUES J F, CASEIRO R, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596.
DOI URL |
| [9] | DALAL N, TRIGGS B. Histograms of oriented gradients for human detection[C]// Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recog-nition, San Diego, Sep 21-23, 2005. Washington: IEEE Com-puter Society, 2005: 886-893. |
| [10] |
BAO F, CAO Y, ZHANG S, et al. Using segmentation with multi-scale selective kernel for visual object tracking[J]. IEEE Signal Processing Letters, 2022, 29: 553-557.
DOI URL |
| [11] | LI H, PU L. Correlation filtering tracking algorithm with joint scale estimation and occlusion processing[C]// Procee-dings of the 2021 International Conference on Intelligent Transportation, Big Data & Smart City, Xi’an, Mar 27-28, 2021. Piscataway: IEEE, 2021: 663-667. |
| [12] | FANG Y, JO G S, LEE C H. RSINet: rotation-scale invariant network for online visual tracking[C]// Proceedings of the 2021 International Conference on Pattern Recognition, Milan, Jan 10-15, 2021. Piscataway: IEEE, 2021: 4153-4160. |
| [13] |
SHAO J, DU B, WU C, et al. Can we track targets from space? A hybrid kernel correlation filter tracker for satellite video[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(11): 8719-8731.
DOI URL |
| [14] | 马珺, 王昱皓. 结合自适应更新策略和再检测技术的跟踪算法[J]. 计算机工程与应用, 2021, 57(9): 217-224. |
| MA J, WANG Y H. Object tracking algorithm based on adap-tive update strategy and re-detection technology[J]. Computer Engineering and Applications, 2021, 57(9): 217-224. | |
| [15] | YUAN Y, CHU J, LENG L, et al. A scale-adaptive object-tracking algorithm with occlusion detection[J]. Eurasip Journal on Image and Video Processing, 2020(1): 7. |
| [16] |
HE X, ZHAO L, CHEN Y C. Variable scale learning for visual object tracking[J]. Journal of Ambient Intelligence and Huma-nized Computing, 2021. DOI: 10.1007/s12652-021-03469-2.
DOI |
| [17] | HAN W, DONG X, KHAN F S, et al. Learning to fuse asym-metric feature maps in siamese trackers[C]// Proceedings of the 2021 IEEE Conference on Computer Vision and Pattern Recognition, Jun 19-25, 2021. Washington: IEEE Computer Society, 2021: 16570-16580. |
| [18] | LI C, LIU X, ZHANG X, et al. Design of UAV single object tracking algorithm based on feature fusion[C]// Proceedings of the 2021 Chinese Control Conference, Shanghai, Jul 26-28, 2021. Piscataway: IEEE, 2021: 3088-3092. |
| [19] | ZHANG K H, ZHANG L, LIU Q S, et al. Fast visual trac-king via dense spatio-temporal context learning[C]// LNCS 8693: Proceedings of the 13th European Conference on Com-puter Vision, Zurich, Sep 6-12, 2014. Cham: Springer, 2014: 127-141. |
| [20] | COMANICIU D, RAMESH V, MEER P. Kernel-based object tracking[J]. IEEE Transactions on Pattern Analysis and Mac-hine Intelligence, 2003, 25(5): 564-575. |
| [21] | DANELLJAN M, KHAN F S, FELSBERG M, et al. Ada-ptive color attributes for real-time visual tracking[C]// Procee-dings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, Jun 23-28, 2014. Washin-gton: IEEE Computer Society, 2014: 1090-1097. |
| [22] |
YIN Y K, DU X P, CHU W B, et al. A color histogram based large motion trend fusion algorithm for vehicle tracking[J]. IEEE Access, 2021, 9: 83394-83401.
DOI URL |
| [23] | MORRIS R, MIRZAEI S. Efficient FPGA implementation of parameterized real time color based object tracking[C]// Proceedings of the 2021 IEEE Annual Information Techno-logy, Electronics and Mobile Communication Conference, Van-couver, Oct 27-30, 2021. Piscataway: IEEE, 2021: 102-105. |
| [24] | ZHANG P, ZHAO J, BO C, et al. Jointly modeling motion and appearance cues for robust RGB-T tracking[J]. IEEE Transac-tions on Image Processing, 2021, 30: 3335-3347. |
| [25] | DANELLJAN M, HAGER G, KHAN F S, et al. Convolu-tional features for correlation filter based visual tracking[C]// Proceedings of the 2015 International Conference on Com-puter Vision, Santiago, Dec 7-13, 2015. Washington: IEEE Computer Society, 2015: 621-629. |
| [26] | DANELLJAN M, HAGER G, KHAN F S, et al. Learning spatially regularized correlation filters for visual tracking[C]// Proceedings of the 2015 International Conference on Com-puter Vision, Santiago, Dec 7-13, 2015. Washington: IEEE Computer Society, 2015: 4310-4318. |
| [27] | DANELLJAN M, ROBINSON A, KHAN F S, et al. Beyond correlation filters: learning continuous convolution operators for visual tracking[C]// LNCS 9909: Proceedings of the 14th European Conference on Computer Vision, Amsterdam, Oct 8-16, 2016. Cham: Springer, 2016: 472-488. |
| [28] | WANG L, GUO S, HUANG W, et al. Places205-VGGNet models for scene recognition[J]. arXiv:1508.01667v1, 2015. |
| [29] | DANELLJAN M, BHAT G, KHAN F S, et al. ECO: effi-cient convolution operators for tracking[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Washington: IEEE Computer Society, 2017: 6931-6939. |
| [30] | BHAT G, JOHNANDER J, DANELLJAN M, et al. Unvei-ling the power of deep tracking[C]// LNCS 11206: Proceedings of the 15th European Conference on Computer Vision, Mun-ich, Sep 8-14, 2018. Cham: Springer, 2018: 493-509. |
| [31] | LI D L, LU R T, YANG X G. Object tracking based on kernel correlation filter and multi-feature fusion[C]// Procee-dings of the 2019 Chinese Automation Congress, Hangzhou, Nov 23-24, 2019. Piscataway: IEEE, 2019: 4192-4196. |
| [32] | BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional siamese networks for object tracking[C]// LNCS 9914: Proceedings of the 14th European Conference on Computer Vision, Amsterdam, Oct 8-16, 2016. Cham: Spri-nger, 2016: 850-865. |
| [33] | LI B, YAN J, WU W, et al. High performance visual tracking with siamese region proposal network[C]// Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Reco-gnition, Salt Lake City, Jun 18-22, 2018. Washington: IEEE Computer Society, 2018: 8971-8980. |
| [34] | WANG Q, ZHANG L, BERTINETTO L, et al. Fast online object tracking and segmentation: a unifying approach[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Pisca-taway: IEEE, 2019: 1328-1338. |
| [35] | FAN H, LING H. Siamese cascaded region proposal networks for real-time visual tracking[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscataway: IEEE, 2019: 7952-7961. |
| [36] | WANG G, LUO C, XIONG Z, et al. SPM-Tracker: series-parallel matching for real-time visual object tracking[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscataway: IEEE, 2019: 3643-3652. |
| [37] | 王玲, 王家沛, 王鹏, 等. 融合注意力机制的孪生网络目标跟踪算法研究[J]. 计算机工程与应用, 2021, 57(8): 169-174. |
| WANG L, WANG J P, WANG P, et al. Siamese network trac-king algorithms for hierarchical fusion of attention mecha-nism[J]. Computer Engineering and Applications, 2021, 57(8): 169-174. | |
| [38] | 李勇, 杨德东, 韩亚君, 等. 融合扰动感知模型的孪生神经网络目标跟踪[J]. 光学学报, 2020, 40(4): 114-125. |
| LI Y, YANG D D, HAN Y J, et al. Siamese neural network object tracking with distractor-aware model[J]. Acta Optica Sinica, 2020, 40(4): 114-125. | |
| [39] | LI X, MA C, WU B Y, et al. Target-aware deep tracking[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Pisca-taway: IEEE, 2019: 1369-1378. |
| [40] | ZHU Z, WANG Q, LI B, et al. Distractor-aware siamese networks for visual object tracking[C]// LNCS 11213: Procee-dings of the 15th European Conference on Computer Vision, Munich, Sep 8-14, 2018. Cham: Springer, 2018: 103-119. |
| [41] | GUO Q, FENG W, ZHOU C, et al. Learning dynamic sia-mese network for visual object tracking[C]// Proceedings of the 2017 International Conference on Computer Vision, Venice, Oct 22-29, 2017. Washington: IEEE Computer Society, 2017: 1781-1789. |
| [42] |
ABDELPAKEY M H, SHEHATA M S. DP-Siam: dynamic policy siamese network for robust object tracking[J]. IEEE Transactions on Image Processing, 2020, 29: 1479-1492.
DOI URL |
| [43] | WANG Q, GAO J, XING J, et al. DCFNet: discriminant correlation filters network for visual tracking[J]. arXiv:1704.04057v1, 2017. |
| [44] | VALMADRE J, BERTINETTO L, HENRIQUES J, et al. End-to-end representation learning for correlation filter based tracking[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Washington: IEEE Computer Society, 2017: 5000-5008. |
| [45] | GUPTA D K, ARYA D, GAVVES E. Rotation equivariant sia-mese networks for tracking[C]// Proceedings of the 2021 IEEE Conference on Computer Vision and Pattern Recognition, Jun 19-25, 2021. Washington: IEEE Computer Society, 2021: 12362-12371. |
| [46] | YAN B, ZHANG X, WANG D, et al. Alpha-refine: boos-ting tracking performance by precise bounding box estima-tion[C]// Proceedings of the 2021 IEEE Conference on Computer Vision and Pattern Recognition, Jun 19-25, 2021. Washington: IEEE Computer Society, 2021: 5289-5298. |
| [47] | ZHANG Z, PENG H. Deeper and wider siamese networks for real-time visual tracking[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscataway: IEEE, 2019: 4591-4600. |
| [48] | LI B, WU W, WANG Q, et al. SiamRPN++: evolution of siamese visual tracking with very deep networks[C]// Procee-dings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Pisca-taway: IEEE, 2019: 4282-4291. |
| [49] | HE A, LUO C, TIAN X, et al. A twofold siamese network for real-time object tracking[C]// Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recog-nition, Salt Lake City, Jun 18-22, 2018. Washington: IEEE Computer Society, 2018: 4834-4843. |
| [50] | HE A F, LUO C, TIAN X M, et al. Towards a better match in siamese network based visual object tracker[C]// LNCS 11129: Proceedings of the 15th European Conference on Computer Vision, Munich, Sep 8-14, 2018. Cham: Springer, 2018: 132-147. |
| [51] | 田朗, 黄平牧, 吕铁军. SA-Siam++: 基于双分支孪生网络的目标跟踪算法[J]. 北京邮电大学学报, 2019, 42(6): 105-110. |
|
TIAN L, HUANG P M, LV T J. SA-Siam++: two-branch siamese network-based object rracking algorithm[J]. Journal of Beijing University of Posts and Telecommunications, 2019, 42(6): 105-110.
DOI |
|
| [52] | TANG Y. Deep learning using linear support vector machines[J]. arXiv:1306.0239v4, 2013. |
| [53] | NAM H, HAN B. Learning multi-domain convolutional neural networks for visual tracking[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, Jun 27-30, 2016. Washington: IEEE Computer Society, 2016: 4293-4302. |
| [54] | NAM H, BAEK M, HAN B. Modeling and propagating CNNs in a tree structure for visual tracking[J]. arXiv:1608.07242v1, 2016. |
| [55] | YUN S, CHOI J, YOO Y, et al. Action-decision networks for visual tracking with deep reinforcement learning[C]// Procee-dings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Washington: IEEE Computer Society, 2017: 1349-1358. |
| [56] | FAN H, LING H. SANet: structure-aware network for visual tracking[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, Jul 21-26, 2017. Washington: IEEE Computer Society, 2017: 2217-2224. |
| [57] | VOIGTLAENDER P, LUITEN J, TORR P H S, et al. Siam R-CNN: visual tracking by re-detection[C]// Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Reco-gnition, Seattle, Jun 14-19, 2020. Washington: IEEE Computer Society, 2020: 6577-6587. |
| [58] | DANELLJAN M, BHAT G, KHAN F S, et al. ATOM: accurate tracking by overlap maximization[C]// Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscataway: IEEE, 2019: 4655-4664. |
| [59] | JIANG B, LUO R, MAO J, et al. Acquisition of localization confidence for accurate object detection[C]// LNCS 11218: Proceedings of the 15th European Conference on Computer Vision, Munich, Sep 8-14, 2018. Cham: Springer, 2018: 816-832. |
| [60] | YAN B, PENG H, WU K, et al. LightTrack: finding light-weight neural networks for object tracking via one-shot archi-tecture search[C]// Proceedings of the 2021 IEEE Conference on Computer Vision and Pattern Recognition, Jun 19-25, 2021. Washington: IEEE Computer Society, 2021: 15180-15189. |
| [61] | WU Y, LIM J, YANG M H. Online object tracking: a bench-mark[C]// Proceedings of the 2013 IEEE Conference on Com-puter Vision and Pattern Recognition, Portland, Jun 23-28, 2013. Washington: IEEE Computer Society, 2013: 2411-2418. |
| [62] | WU Y, LIM J, YANG M H. Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelli-gence, 2015, 37(9): 1834-1848. |
| [63] | KRISTAN M, PFLUGFELDER R, LEONARDIS A, et al. The visual object tracking VOT2013 challenge results[C]// Proceedings of the 2013 International Conference on Com-puter Vision, Berlin, Oct 1-8, 2013. Washington: IEEE Com-puter Society, 2013: 98-111. |
| [64] | KRISTAN M, PFLUGFELDER R P, LEONARDIS A, et al. The visual object tracking VOT2014 challenge results[C]// LNCS 8926: Proceedings of the 13th European Conference on Computer Vision, Zurich, Sep 6-12, 2014. Cham: Springer, 2014: 191-217. |
| [65] | KRISTAN M, MATAS J, LEONARDIS A, et al. The visual object tracking VOT2015 challenge results[C]// Proceedings of the 2015 International Conference on Computer Vision, San-tiago, Dec 7-13, 2015. Washington: IEEE Computer Society, 2015: 564-586. |
| [66] | KRISTAN M, LEONARDIS A, MATAS J, et al. The visual object tracking VOT2016 challenge results[C]// LNCS 9914: Proceedings of the 14th European Conference on Computer Vision, Amsterdam, Oct 8-16, 2016. Cham: Springer, 2016: 777-823. |
| [67] | KRISTAN M, LEONARDIS A, MATAS J, et al. The visual object tracking VOT2017 challenge results[C]// Proceedings of the 2017 International Conference on Computer Vision, Venice, Oct 22-29, 2017. Washington: IEEE Computer Soci-ety, 2017: 1949-1972. |
| [68] | KRISTAN M, LEONARDIS A, MATAS J, et al. The sixth visual object tracking VOT2018 challenge results[C]// LNCS 11129: Proceedings of the 15th European Conference on Com-puter Vision, Munich, Sep 8-14, 2018. Cham: Springer, 2018: 3-53. |
| [69] | KRISTAN M, BERG A, ZHENG L, et al. The seventh visual object tracking VOT2019 challenge results[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision, Seoul, Oct 27-28, 2019. Piscataway: IEEE, 2019: 2206-2241. |
| [70] | MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for UAV tracking[C]// LNCS 9905: Proceedings of the 14th European Conference on Computer Vision, Amster-dam, Oct 8-16, 2016. Cham: Springer, 2016: 445-461. |
| [71] | MÜLLER M, BIBI A, GIANCOLA S, et al. TrackingNet: a large-scale dataset and benchmark for object tracking in the wild[C]// LNCS 11205: Proceedings of the 15th European Con-ference on Computer Vision, Munich, Sep 8-14, 2018. Cham: Springer, 2018: 310-327. |
| [72] | HUANG L, ZHAO X, HUANG K. GOT-10k: a large high-diversity benchmark for generic object tracking in the wild[J]. IEEE Transactions on Pattern Analysis and Machine Inte-lligence, 2021, 43(5): 1562-1577. |
| [73] | FAN H, LIN L, YANG F, et al. LaSOT: a high-quality bench-mark for large-scale single object tracking[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscata-way: IEEE, 2019: 5374-5383. |
| [74] | REZATOFIGHI H, TSOI N, GWAK J, et al. Generalized intersection over union: a metric and a loss for bounding box regression[C]// Proceedings of the 2019 IEEE/CVF Confe-rence on Computer Vision and Pattern Recognition, Long Beach, Jun 16-20, 2019. Piscataway: IEEE, 2019: 658-666. |
| [1] | AN Fengping, LI Xiaowei, CAO Xiang. Medical Image Classification Algorithm Based on Weight Initialization-Sliding Window CNN [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(8): 1885-1897. |
| [2] | ZENG Fanzhi, XU Luqian, ZHOU Yan, ZHOU Yuexia, LIAO Junwei. Review of Knowledge Tracing Model for Intelligent Education [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(8): 1742-1763. |
| [3] | XIA Hongbin, XIAO Yifei, LIU Yuan. Long Text Generation Adversarial Network Model with Self-Attention Mechanism [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1603-1610. |
| [4] | ZHAO Xiaoming, YANG Yijiao, ZHANG Shiqing. Survey of Deep Learning Based Multimodal Emotion Recognition [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1479-1503. |
| [5] | ZHANG Haocong, LI Tao, XING Lidong, PAN Fengrui. Parallel Implementation of OpenVX Feature Extraction Functions in Programmable Processing Architecture [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1583-1593. |
| [6] | SUN Fangwei, LI Chengyang, XIE Yongqiang, LI Zhongbo, YANG Caidong, QI Jin. Review of Deep Learning Applied to Occluded Object Detection [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(6): 1243-1259. |
| [7] | LIU Yafen, ZHENG Yifeng, JIANG Lingyi, LI Guohe, ZHANG Wenjie. Survey on Pseudo-Labeling Methods in Deep Semi-supervised Learning [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(6): 1279-1290. |
| [8] | DONG Wenxuan, LIANG Hongtao, LIU Guozhu, HU Qiang, YU Xu. Review of Deep Convolution Applied to Target Detection Algorithms [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(5): 1025-1042. |
| [9] | CHENG Weiyue, ZHANG Xueqin, LIN Kezheng, LI Ao. Deep Convolutional Neural Network Algorithm Fusing Global and Local Features [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(5): 1146-1154. |
| [10] | ZHONG Mengyuan, JIANG Lin. Review of Super-Resolution Image Reconstruction Algorithms [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(5): 972-990. |
| [11] | PEI Lishen, ZHAO Xuezhuan. Survey of Collective Activity Recognition Based on Deep Learning [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(4): 775-790. |
| [12] | XU Jia, WEI Tingting, YU Ge, HUANG Xinyue, LYU Pin. Review of Question Difficulty Evaluation Approaches [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(4): 734-759. |
| [13] | ZHU Weijie, CHEN Ying. Micro-expression Recognition Convolutional Network for Dual-stream Temporal-Domain Information Interaction [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(4): 950-958. |
| [14] | ZHANG Quangui, HU Jiayan, WANG Li. One Class Collaborative Filtering Recommendation Algorithm Coupled with User Common Characteristics [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(3): 637-648. |
| [15] | JIANG Yi, XU Jiajie, LIU Xu, ZHU Junwu. Research on Edge-Guided Image Repair Algorithm [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(3): 669-682. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
/D:/magtech/JO/Jwk3_kxyts/WEB-INF/classes/